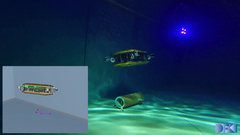
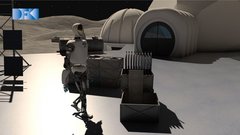
Durchführung einer autonomen Mission im ISS-Setup.
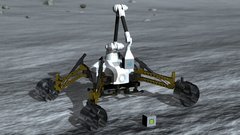
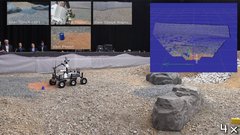
Der am DFKI Robotics Innovation Center entwickelte Rover Artemis wurde mit einem Penetrometer ausgerüstet, das den Eindringwiderstand des…
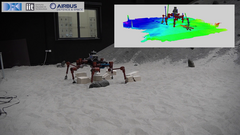
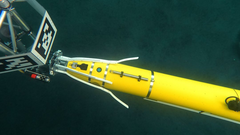
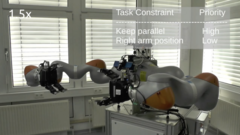
Der DFKI Quad B12 Roboter ist eine spannende Forschungsplattform, die im Underactuated Lab am DFKI RIC entwickelt wird. Das Video zeigt eine…
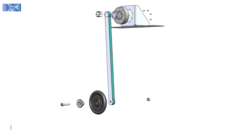
In diesem Beitrag werden das Design, die Analyse und die Leistungsbewertung von RicMonk vorgestellt, einem neuartigen dreigliedrigen…
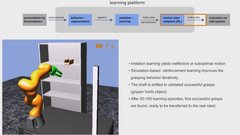
Ziel des Projekts ist es, ein halbautonomes, mobiles System zu entwerfen und zu entwickeln, das in der Lage ist, Früchte unabhängig von…
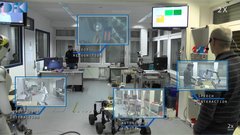
Im Katastrophenfall zählt jede Sekunde. Um wertvolle Zeit zu sparen und die Sicherheit der Einsatzkräfte zu erhöhen, entwickelt das DFKI…
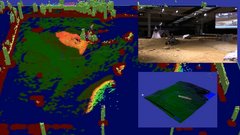
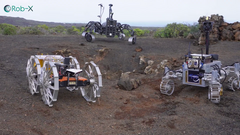
SherpaTT zeigt seine Fähigkeit mittels aktiven Fahrwerk auch große Unebenheiten ausgleichen zu können.