SpiderCam
SpiderCam Kabel Roboter

Ansprechpartner/in:
Technische Details
| Gewicht: | bis zu 150 kg Zuladung |
| Stromversorgung: |
4 x 32 A, 400 V
|
| Geschwindigkeit: | max: 2000 mm/s |
| Sensoren: |
8 Absolutencoder
|
| Hersteller: |
Spidercam GmbH
|
| Max. Beschleunigung: |
1529 mm/s²
|
| Positionsgenauigkeit: |
< 5 mm
|
| Freiheitsgrade: |
3 (horizontale und vertikale Translation)
|
| Arbeitsbereich: |
ca. 16m x 7m x 6m (L x B x H)
|
Organisatorische Details |
|
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
Inveritas
Innovatice technologies for relative navigation and capture
(05.2009- 03.2012)
Stardust Reloaded
On-Orbit Servicing with Robotic Manipulators
(01.2019- 06.2023)
Stardust Reloaded
On-Orbit-Wartung mit Roboter-Manipulatoren
(01.2019- 06.2023)
Inveritas
Innovative Technologien zur Relativnavigation (-bewegung) und Capture mobiler autonomer Systeme
(05.2009- 03.2012)
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung
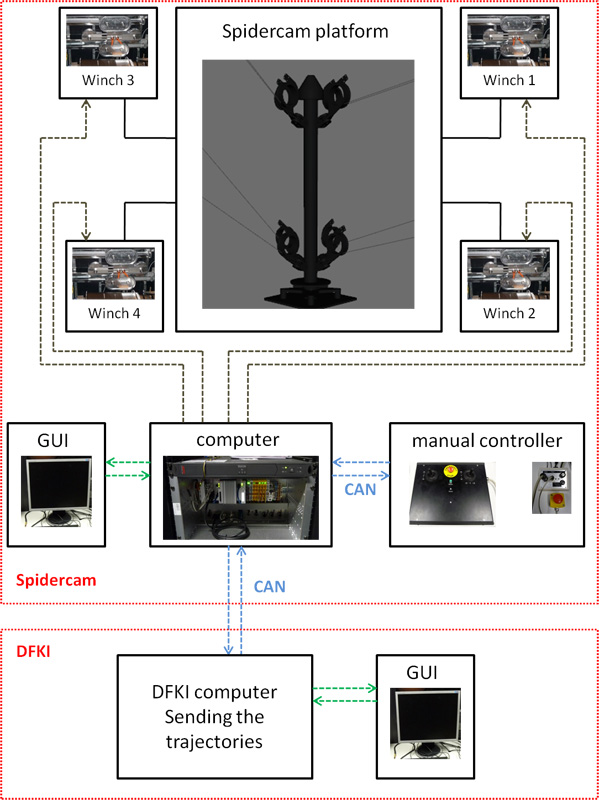
Die SpiderCam ist ein Kabelroboter, bestehend aus einem Mount, 8 Kabeln, die zu 4 Winden führen und einer Steuerung. Die Winden können die Längen von je zwei Kabeln ändern, wodurch der Mount durch die Explorationshalle geflogen werden kann. Der Mount wird durch Daten- und Stromleitungen in den Kabeln mit Energie und Daten versorgt. Über einen CAN- Bus kann der SC Positionsänderungen vorgegeben werden. Im Gegenzug sendet die SC ihre aktuelle Position aufgrund der internen Kabellängenmessung. Die SC kann 150 kg tragen und wird im Projekt INVERITAS eingesetzt, um einen Service Satelliten zu simulieren.
Videos
Inveritas: Relativnavigation und Capture
Die prototypische Realisierung eines breit einsetzbaren RendezVous und Capture Systems.