Stardust Reloaded
On-Orbit-Wartung mit Roboter-Manipulatoren

Das Stardust Reloaded Projekt ist ein europäisches Forschungsprojekt, das durch die Marie Sklodowska-Curie Actions Innovative Training Networks (ITN) des Horizon 2020 (H2020) Programms der Europäischen Union finanziert wird. Das Projekt befasst sich mit dem wachsenden Bedarf an einer nachhaltigen Nutzung des Weltraums, der Widerstandsfähigkeit der Weltraumumgebung, der Bedrohung und den Möglichkeiten durch Asteroiden und dem zwingenden Bedarf an gut ausgebildeten Fachkräften, die diese Probleme angehen können. Im Rahmen des Projekts befasst sich das DFKI mit der Entwicklung und experimentellen Validierung eines autonomen, freischwebenden Manipulatorsystems für die Ergreifung von nicht-kooperativen Zielen und die On-Orbit-Betreuung von kooperativen Zielen.
| Laufzeit: | 01.01.2019 bis 30.06.2023 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: | Europäische Union |
| Förderkennzeichen: | Dieses Projekt wurde aus dem Forschungs- und Innovationsprogramm Horizont 2020 der Europäischen Union im Rahmen der Marie Sklodowska Curie-Fördervereinbarung Nr. 813644 finanziert. |
| Webseite: | http://www.stardust-network.eu |
| Partner: |
University of Strathclyde, |
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
RTES-TA
Robotische Technologien zur Entsorgung von Weltraumschrott
(10.2012-
03.2013)
Inveritas
Innovative Technologien zur Relativnavigation (-bewegung) und Capture mobiler autonomer Systeme
(05.2009-
03.2012)
ITN Stardust
Arbeitspaket Nahbereichsnavigation und Manipulation von Weltraumschrott und Asteroiden
(02.2013-
01.2017)
Mare-IT
Informationstechnologie für maritime Anwendungen
(08.2018-
11.2021)
|
| Verwandte Robotersysteme: |
SpiderCam
SpiderCam Kabel Roboter
KUKA KR 60
KUKA KR 60-3 Roboter Arm
|
| Verwandte Software: |
Rock
Robot Construction Kit
MARS
Machina Arte Robotum Simulans
Phobos
Ein Blender-Add-On zum Editieren und Export von Robotermodellen für die MARS-Simulation
CAD-2-SIM
Computer Aided Design To Simulation
|

Projektdetails

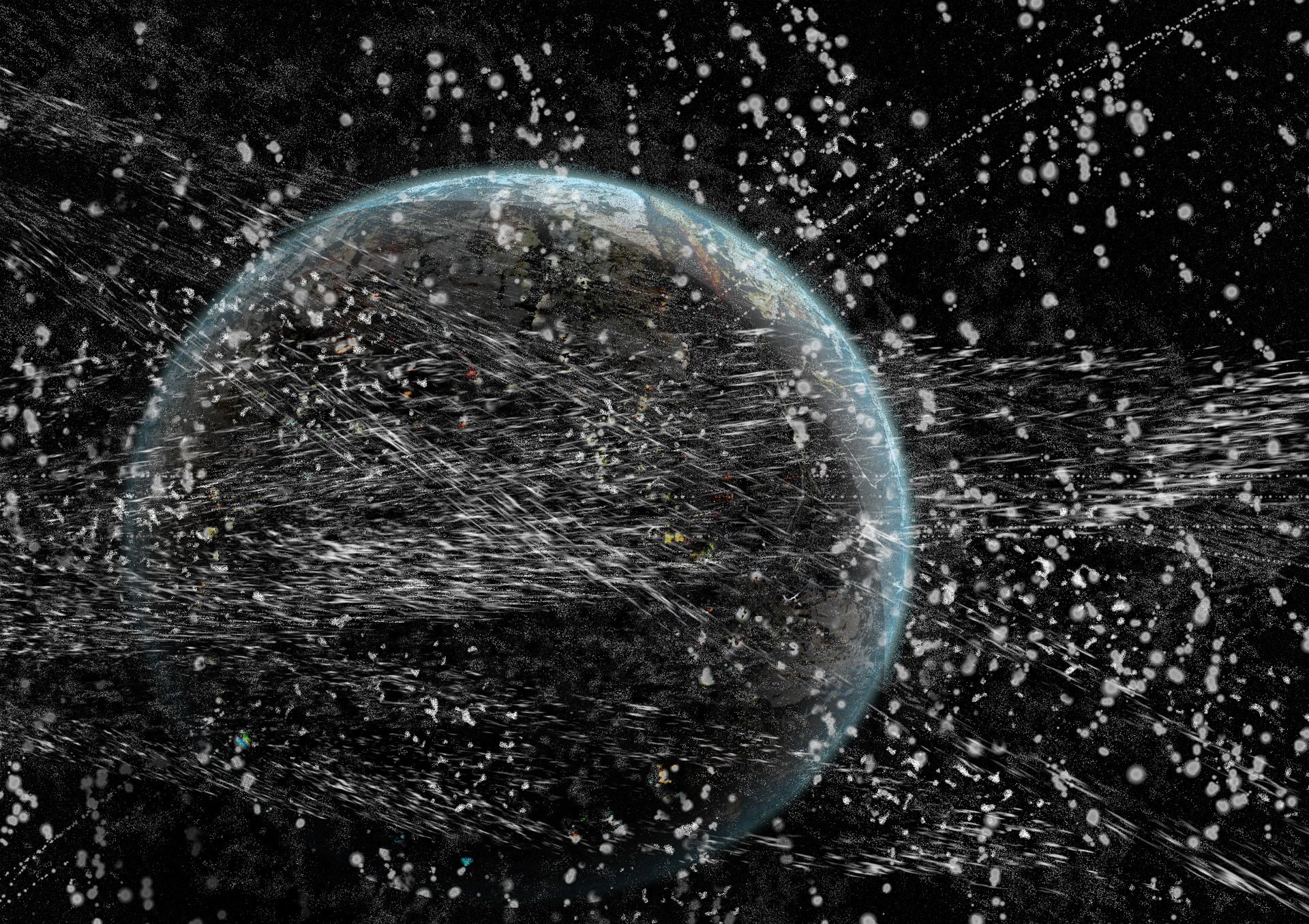
Der derzeitige Umfang an Weltraumschrott im Orbit, kombiniert mit dem erwarteten Anstieg der Raumfahrtsysteme, wird eine beispiellose Auswirkung auf die erdnahe Weltraumumgebung haben und ernsthafte Fragen nach ihrer Stabilität und Widerstandsfähigkeit gegen Vorfälle oder anomale Ereignisse aufwerfen.
Ein Asteroideneinschlag hätte, obwohl er statistisch wenig wahrscheinlich ist, verheerende Folgen für unseren Planeten. Asteroiden und Weltraummüll stellen daher eine erhebliche Gefahr für Weltraum und terrestrische Infrastruktur, aber auch eine der interessantesten Herausforderungen an die Weltraumforschung und -technologie dar.
Das Projekt Stardust Reloaded (Stardust-R) zielt darauf ab, diese Herausforderungen anzugehen, indem es den Erfolg des vorherigen Stardust Projekts, eines Initial Training Network, das von 2013 bis 2017 stattfand, nutzt und darauf weiter aufbaut.
Stardust-R wird das Verständnis für die Entwicklung der Weltraumumgebung um die Erde herum verbessern und Möglichkeiten aufzeigen, wie der ständig wachsende Verkehr im Weltraum sicher bewältigt werden kann, um Kollisionen zu vermeiden und eine nachhaltige Nutzung des Weltraums zu ermöglichen. Darüber hinaus wird das Projekt auch unser Wissen über Form, Schwerkraft, Zusammensetzung und Dynamik von Asteroiden und Kometen im Hinblick auf mögliche Maßnahmen zur Vermeidung katastrophaler Auswirkungen auf die Erde erweitern. Im Projekt wird auch erforscht, wie Mineralressourcen auf kleinen Himmelskörpern genutzt werden können, um unser Verständnis des Sonnensystems zu verbessern.
Das Projekt wird durch die Marie Sklodowska-Curie-Aktionen Innovative Training Networks des Programms Horizion 2020 (H2020) der Europäischen Union finanziert und umfasst 20 Partner, darunter die europäischen, französischen und deutschen Luftfahrtbehörden, in denen 15 Nachwuchsforscher (ESRs) unterstützt werden. Die ESRs werden in Mathematik, Physik, Informatik, Robotik und Luft- und Raumfahrttechnik geschult, um effektive Lösungen zu finden, die die Weltraumumgebung sicherer machen, und auch um mehr über Kleinkörper (Asteroiden, Kometen und Meteoride) zu lernen und letztendlich die Erde und unsere Weltraumressourcen zu schützen.
Der Teil des am DFKI durchgeführten Stardust-R-Projekts befasst sich insbesondere mit der Entwicklung eines Echtzeit-Steuerungssystems für einen frei schwebenden Manipulator, sowohl für die Entfernung von Weltraummüll als auch für die Wartung von Raumfahrtsystemen im Orbit. Außerdem wird die Entwicklung durch Verifikation unter realistischen Bedingungen mit einem Unterwasserfahrzeug unterstützt. Die Verwendung eines manipulatorgestützten Systems zu diesem Zweck stellt besondere Herausforderungen dar, da ein hohes Maß an Autonomie erforderlich ist, um die begrenzte Reaktionszeit bei Anomalien und/oder Kommunikationsproblemen und das nichtholonome Verhalten der gesamten Raumsonde während der Nutzung des Manipulators zu berücksichtigen. Tatsächlich gibt es das Konzept einer aktiven Entsorgung von Weltraummüll mit im Orbit eingesetzten Robotern seit Anfang der 80er Jahre. Allerdings gibt es noch kein robotisches System, das ein nicht kooperatives, taumelndes Objekts erfolgreich ergreifen konnte, insbesondere im Free-Floating-Modus.
Weitere Informationen über das Projekt Stardust Reloaded sind unter folgendem Link zu finden: http://www.stardust-network.eu/