PRO-ACT (OG11)
Planetary RObots Deployed for Assembly and Construction Tasks
")
Das Hauptziel von PRO-ACT ist die Implementierung und Demonstration mehrerer Robotersysteme, die miteinander kooperieren können, um verschiedene Aufgaben in einem lunaren Missionsszenario zu erfüllen. Die Ergebnisse aus den vorherigen Operational Grants (OGs) aus dem PERASPERA-Projekt – OG1 ESROCOS, OG2 ERGO, OG3 InFuse, OG4 I3DS, OG5 SIROM – werden berücksichtigt, um (1) die Montage einer ISRU-Anlage auf dem Mond als Vorläufer der menschlichen Besiedlung und (2) eine Teilmontage eines mobilen Portals zu ermöglichen. Das Portal soll sowohl für den 3D-Druck von Bauelementen für die Montage und den Bau menschlicher Lebensräume als auch zur Staubbekämpfung verwendet werden

Projektdetails

In-Situ Resource Utilization (ISRU) ermöglicht Nachhaltigkeit in der Weltraumforschung, indem es die im Weltraum verfügbaren Ressourcen nutzt, um Produkte und Dienstleistungen für die Roboterforschung, die menschliche Erforschung und für kommerzielle Zwecke zu entwickeln.
Die Europäische Weltraumorganisation (ESA) bereitet eine Mission vor, um die Durchführbarkeit der ISRU auf dem Mond nachzuweisen.
Solche ISRU-Anlagen würden dabei als Wasser- und Sauerstoffquelle sowie als menschliche Außenposten dienen und zudem die Lieferung von Wasserstoff und Sauerstoff an verschiedene Orte im Mondraum ermöglichen.
Das Projekt PRO-ACT zielt in diesem Zusammenhang auf einen neuen Ansatz, bei dem mehrere Roboter zur Errichtung einer ISRU-Pilotanlage eingesetzt werden. Dabei sollen die Roboter miteinander auf die Erreichung gemeinsamer Ziele hinarbeiten, u.a. durch kooperative Missionsplanung und ausführende Handlungen für den Transport und die Montage der Anlage und ihrer unterstützenden Infrastruktur.
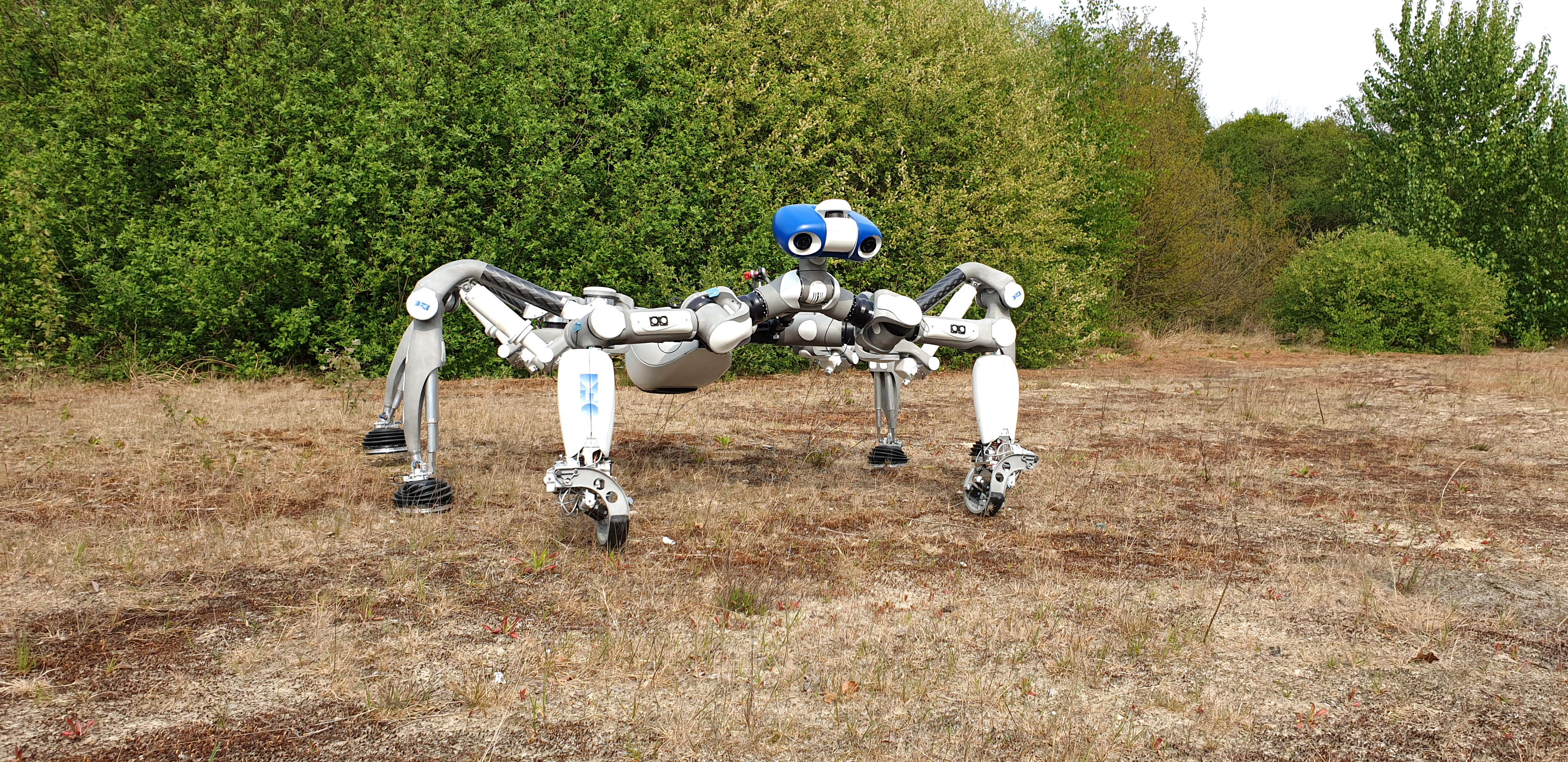
Das DFKI wird die Zusammenarbeit im multi-robotischen Team innerhalb des planetarischen Konstruktionsszenarios mit dem sechsbeinigen Robotersystem Mantis unterstützen, indem u.a. die Ergebnisse der vorherigen OGs 1-5 in PERASPERA berücksichtigt und implementiert werden.
PRO-ACT ist ein Projekt, das im Rahmen des EU-Förderprogramms Horizont 2020 aus dem PERASPERA (Plan European Roadmap and Activities for Space Exploitation of Robotics and Autonomy)-Aufruf hervorgegangen ist.
Videos
PRO-ACT: Multi-Roboter-Kooperation im Weltraum
Die Multi-Robotik-Kooperation ist eine von mehreren Schlüsseltechnologien, die für die Erforschung des Planeten als vielversprechend angesehen werden. Im Rahmen des PRO-ACT-Projekts wurden diese Technologien angewandt und weiterentwickelt. Die beteiligten Robotersysteme VELES (ein sechsrädriger Rover von PIAP Space, Polen), Mantis (ein sechsbeiniges Laufrobotersystem von DFKI, Deutschland) und die Mobile Gantry (eine vierrädrige Gantry mit einem 3D-Drucker von AVS, Spanien) waren für die gemeinsame Durchführung von Aufgaben vorgesehen. In den letzten Monaten des Projekts verschlechterte sich die Situation aufgrund der Corona-Pandemie, und infolgedessen nahmen auch die Reisebeschränkungen zu, so dass die gemeinsamen Tests mit den Robotersystemen nicht wie geplant durchgeführt werden konnten. Das Video gibt einen Einblick, wie die kooperativen Aufgaben dennoch getestet werden konnten, um das Projekt erfolgreich abzuschließen.
Weitere Videos zeigen die durchgeführten Abschlusstests im technischen Detail.
PRO-ACT: Planetary Robots Deployed for Assembly and Construction Tasks
The animation shows the planned mission scenarios of the three robotic systems involved.
The robotic systems involved are Mantis from the Robotics Innovation Center of the German Research Center for Artificial Intelligence (DFKI) in Germany, VELES from Piap Space in Poland and the mobile gantry from AVS in Spain.
Intelligente Weltraum-Robotik: DFKI-Wissenschaftlerin Wiebke Brinkmann über die Forschung in Bremen