PERIOD (OG12)
PERASPERA In-Orbit Demonstration (Operational Grant 12)
")
Das Projekt PERASPERA In-Orbit Demonstration (PERIOD) ist eines der Operational Grants (OGs) der dritten Phase des Horizon 2020 Space Strategic Research Cluster on Space Robotics Technologies der Europäischen Union mit dem Ziel, den Reifegrad von Raumfahrttechnologien zu erhöhen und sie für eine In-Orbit-Demonstration vorzubereiten, die im Zeitrahmen von 2023-2027 geplant ist. Konkret wird das Projekt auf der Arbeit früherer OGs aufbauen, um den Technologiereifegrad von Kerntechnologien zu erhöhen und ein orbitales Demonstrationskonzept für On-Orbit-Servicing und Montage zu definieren. Die Aufgaben des DFKI im Rahmen des Projekts bestehen hauptsächlich in der Bewertung des Stands der Technik von Standardschnittstellen, die benutzt werden um (modulare) Systeme/Komponente miteinander zu verbinden, im Hinblick auf das Demonstrationsszenario und der Definition einer konzeptionellen cyber-physischen Systemarchitektur für ein Fertigungs- und Montagesystem im Orbit.

Projektdetails

BSeit dem Start des ersten künstlichen Satelliten hat die Natur der Raumfahrt jede Raumfahrtmission in Bezug auf Masse, Lebensdauer und letztlich Kosten stark eingeschränkt. Das Ergebnis sind meist hochintegrierte Einweg-Raumfahrtsysteme, die bei Bedarf nur schwer zu warten und/oder aufzurüsten sind. Gleichzeitig erfordert die derzeitige Verbreitung von Weltraummüll eine nachhaltigere Nutzung der Umgebung im Orbit, was mit dem aktuell angenommenen Missionsparadigma nur schwer zu erreichen ist. All diese Tatsachen weisen auf die Notwendigkeit eines Richtungswechsels bei Raumfahrtmissionen und der Morphologie des Raumfahrzeugdesigns hin, um eine kosteneffektive Wartung und Montage im Orbit zu ermöglichen, die die Lebenszykluskosten von Raumfahrzeugen reduzieren und gleichzeitig ihre Leistungsfähigkeit und Flexibilität im Falle eines Ausfalls oder unerwarteter Ereignisse erhöhen könnte.
Mit dem Horizon 2020 Space Strategic Research Cluster (SRC) on Space Robotics Technologies verfolgt die Europäische Union den Ansatz, diesen Richtungswechsel zu erreichen, indem sie die Reife von Weltraum-Robotik-Technologien für die Wartung und Montage im Orbit schrittweise erhöht und diese im Zeitrahmen von 2023-2027 mit umfangreichen Demonstrationsmissionen validiert.
Das Projekt PERASPERA In-Orbit Demonstration (PERIOD) ist eines der Operational Grants (OGs) der dritten Phase des SRC mit dem Ziel, ein Orbital-Demonstrator-Konzept zu definieren und dabei die Arbeiten der vorangegangenen Phasen des SRC zu nutzen, die sich mit dem Entwurf, der Herstellung und dem Testen von zuverlässigen und leistungsstarken Roboter-Bausteinen befasst haben
Die spezifischen Ziele des Projekts sind:
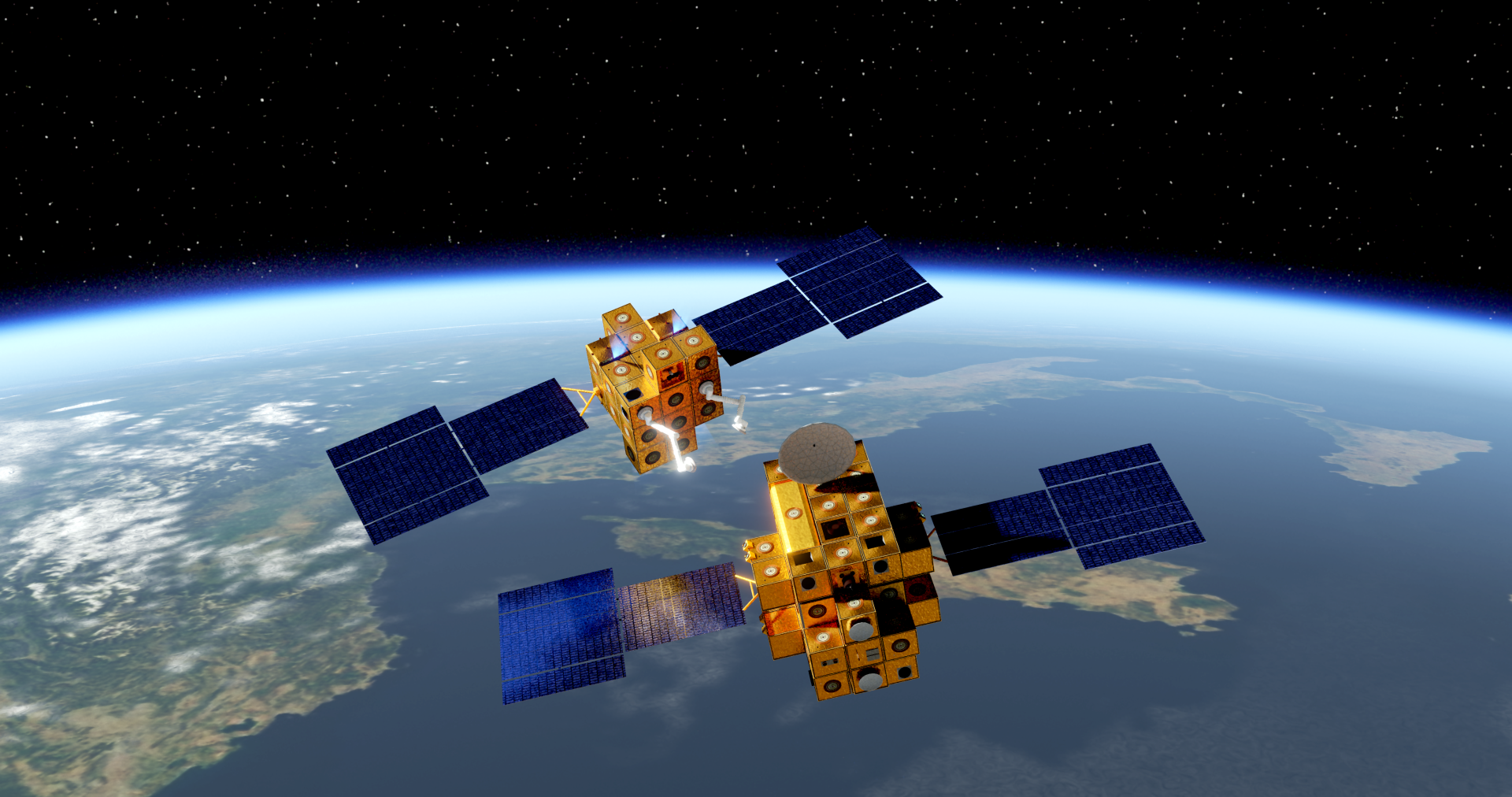
a) Definition eines Demonstrator Konzepts basierend auf einer orbitalen Fabrik, die auf der Bartolomeo-Plattform der Internationalen Raumstation integriert ist, um ein Raumfahrzeug im Orbit herzustellen und zu betreiben.
b) Weiterentwicklung von Kernsoftwarekomponenten der Weltraumrobotik bis zum „Technology Readiness Level“ 5.
c) Evaluierung des aktuellen Stands der Technik von Standardschnittstellen in einem Benchmark-Szenario.
d) Evaluierung aller Kernkomponenten für die Montage auf einem „Breadboard“.
e) Durchführung von Kommunikations- und Verbreitungsaktivitäten, um die Raumfahrtgemeinde und potenzielle Kunden über die Fähigkeiten der Wartung und Montage im Orbit zu informieren sowie Transparenz über Risiken und Abhilfemaßnahmen zu schaffen.
Die Aufgaben des DFKI im Rahmen des Projekts adressieren insbesondere:
a) Die Evaluierung des aktuellen Stands der Technik von Standardschnittstellen in einem repräsentativen Benchmark-Szenario.
b) Die Definition vorläufiger Anforderungen und der Entwicklungslogik der Wahrnehmungs- und Darstellungskomponenten der Orbitalen Fabrik.
c) Die Definition einer konzeptionellen cyber-physikalischen Systemarchitektur der Orbitalen Fabrik und ein „Proof-of-Concept“ für einen ausgewählten Aspekt.
Weitere Informationen zum PERIOD sind unter folgender URL zu finden: https://period-h2020.eu/.
Videos
PERIOD: Benchmark für standardisierte Schnittstellen für die Verwendung in der orbitalen Fabrik
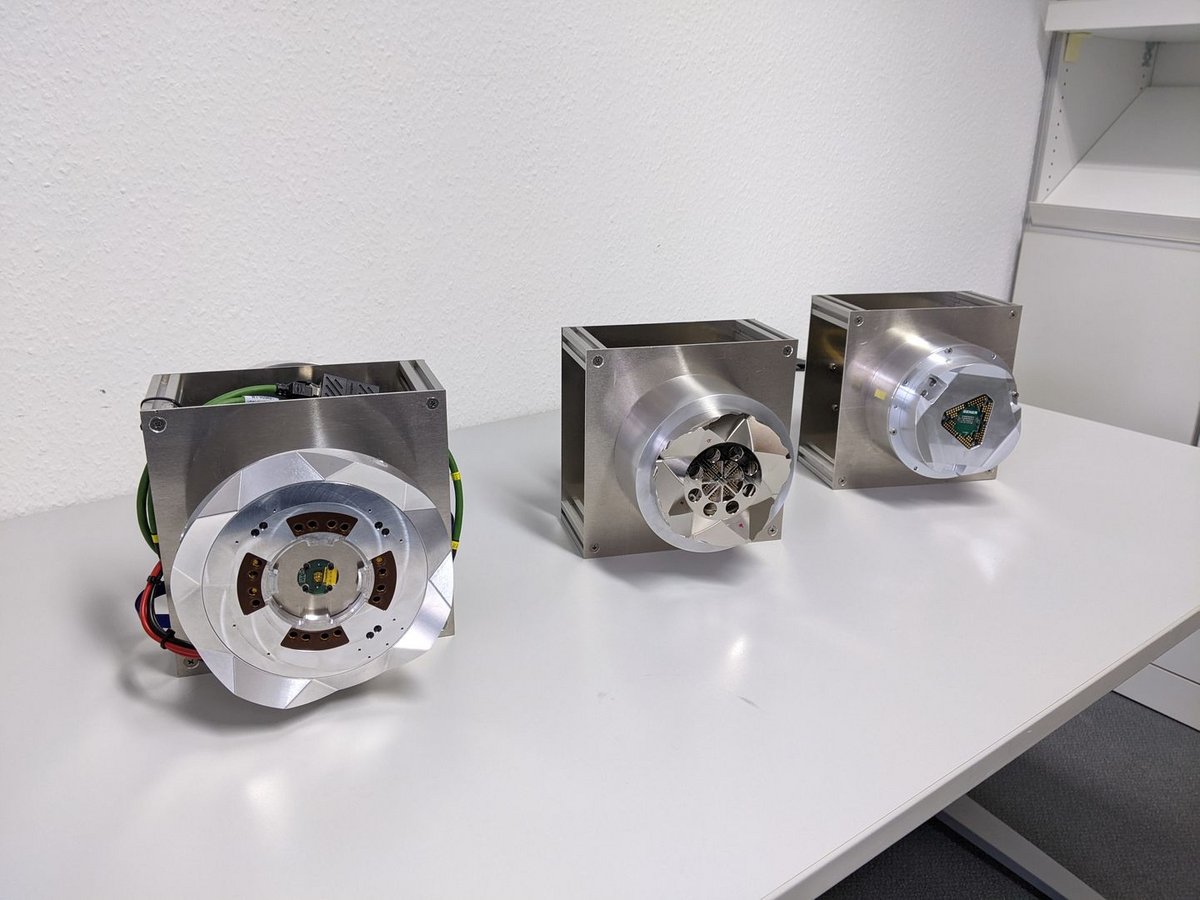
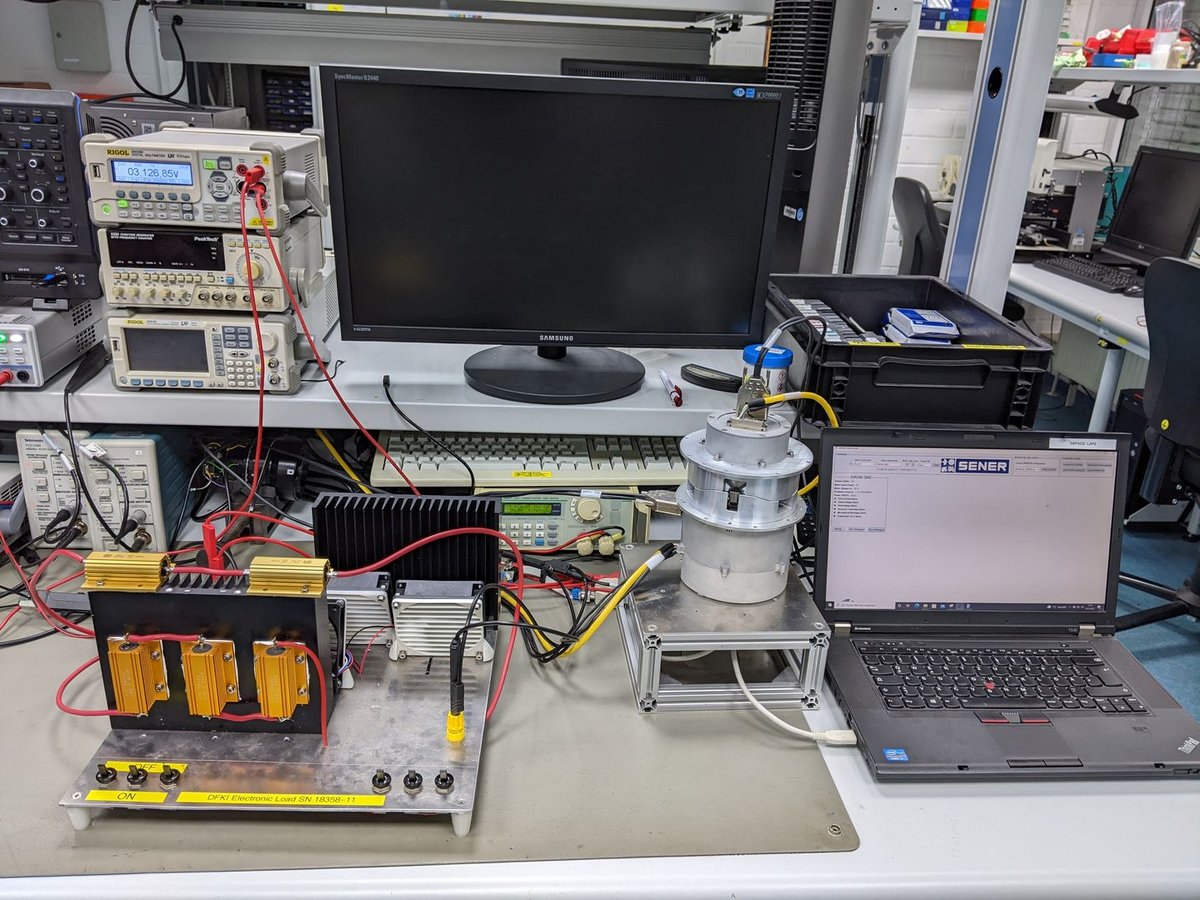
Zukünftige orbitale Fabriken benötigen standardisierte Komponenten für die Herstellung und den Zusammenbau modularer Raumfahrzeuge. Eine dieser Komponenten ist eine multifunktionale Schnittstelle, die es ermöglicht, verschiedene Subsysteme eines modularen Raumfahrzeugs mechanisch und elektrisch miteinander zu verbinden. Um die am besten geeignete Schnittstelle für das geplante Demonstrationsszenario des PERIOD-Projekts auszuwählen, wurde am DFKI ein Benchmarking der drei modernsten europäischen Schnittstellenselemente durchgeführt. Die Tests verglichen die elektrischen und mechanischen Fähigkeiten der Schnittstellen und schufen einen Präzedenzfall dafür, wie künftige Benchmarks von multifunktionalen Verbindungen gestaltet und durchgeführt werden können.
SIROM: Tests der Reichweite vom Greifmechanismus
Mechanischer Test des SIROM von SENER Aeroespacial S.A. zur Überprüfung der Ergreifungsreichweite.
HOTDOCK: Test mit Ausrichtungsfehlern
Mechanischer Test des HOTDOCK von Space Applications Services NV zur Überprüfung seiner Möglichkeiten zur Korrektur der Ausrichtungsfehler mit Hilfe der Ausrichtungskrone.
HOTDOCK: Auslösetest unter Last
Mechanische Tests des iSSI® von iBOSS GmbH, HOTDOCK von Space Applications Services NV und SIROM von SENER Aeroespacial S.A. zur Identifizierung ihrer Fähigkeiten, eine gekoppelte Schnittstelle unter Last zu lösen. Bitte beachten Sie, dass das Verhalten der Schnittstellen während der dargestellten Tests aufgrund der unterschiedlichen numerischen Werte, die für die anfänglichen axialen, radialen und winkligen Verlagerungen verwendet wurden, nicht für einen direkten Vergleich geeignet ist.
Fotos