MINOAS
Marine Inspection Robotic Assistant System

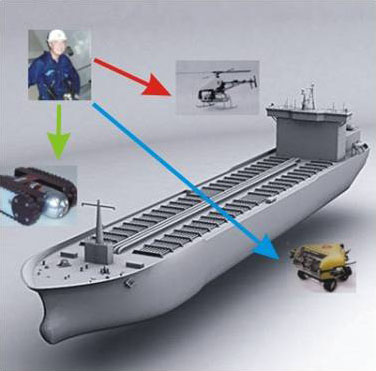
Das von der EU geförderte Projekt MINOAS entwickelt ein neues Konzept für die Inspektion von Schiffen. In einem ganzheitlichen Ansatz entwickelt MINOAS dabei eine neue Vorgehensweise, bei der Inspektoren und mobile, mit hoch-auflösenden Sensoren ausgestattete Roboter, eng zusammen arbeiten. MINOAS setzt dabei fahrende, kletternde und fliegende Roboter ein um die verschiedenen Bereiche eines Schiffes zu erreichen. Die von den Robotern gesammelten Informationen werden integriert und in einer Kommandozentrale interaktiv zugänglich gemacht. Der z.T. sehr aufwändige Inspektionsprozess wird dadurch insgesamt effizienter und sicherer.
| Laufzeit: | 01.06.2009 bis 30.06.2012 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: | Europäische Union |
| Förderkennzeichen: | Gefördert von der Europäischen Kommission. (SCP8-GA-2009-233715) |
| Partner: | RINA, IT (coordinator); Glafcos Marine, GR; Lloyd’s Register, UK; Neorion Shipyards, GR; MTG-Dolphin Shipyards, BG; Rigel Engineering, IT; Universitat de les Illes Balears, SP; CNR-ISSIA, IT; Horama, GR |
| Anwendungsfelder: | Logistik, Produktion und Consumer |
| Verwandte Robotersysteme: |
Magnet Crawler
Marine Inspection Robotic Assistant System
Magnet Crawler
Marine Inspection Robotic Assistant System
|

Projektdetails
Eine heterogene und multimodale MINOAS-Roboterflotte wird in der Lage sein, fast alle wichtigen Sektionen eines Schiffes, insbesondere auch schwer zugängliche Regionen (z.B. hohe Frachträume oder den Schiffsrumpf) mit verringertem Personalaufwand und ohne aufwändige Hilfsmittel (z.B. begehbare Gerüste) zu inspizieren. Dadurch werden Kosten optimiert und die Arbeitssicherheit der Inspekteure deutlich verbessert. Durch den Einsatz von Robotern können zudem mehrere Inspektionsvorgänge parallel durchgeführt und so der gesamte Inspektionsprozess, der derzeit noch Abschnitt für Abschnitt durch einzelne Inspektoren erfolgt, beschleunigt werden.
Die betrachteten Anwendungszenarien konzentrieren sich zunächst auf die Inspektion der Frachträume und den Rumpf von Bulk Carriern. Dabei soll vor allem die visuelle Inspektion und Messung der Wandstärke von Robotern unterstützt werden.
Die von den Robotern gesammelten Informationen werden in einer zentralen Kommandozentrale zusammengefasst, ausgewertet und anwendergerecht präsentiert. Dadurch kann der gesamte Prozess der (automatisierten) Schiffsinspektion umfassend dokumentiert werden. Auf Basis einer solchen Dokumentation können Verbesserungsmöglichkeiten identifiziert, Prozesse standardisiert und Handlungsempfehlungen entwickelt werden.
Webseite: http://www.minoasproject.eu/
Videos
MINOAS: Systemtests in Varna
Der Magnet Crawler und das 3D Lokalisierungssystem wurden in realer Umgebung auf einem Schiff getestet.
MINOAS: Magnet Crawler 2
Magnetischer Kletterroboter zur Inspektion von Stahlstrukturen
MINOAS: Magnet Crawler
Der Magnet Crawler Roboter klettert an der Außenwand der DFKI Explorationshalle
