EurEx-SiLaNa
EurEx-Sichere Langzeitnavigation

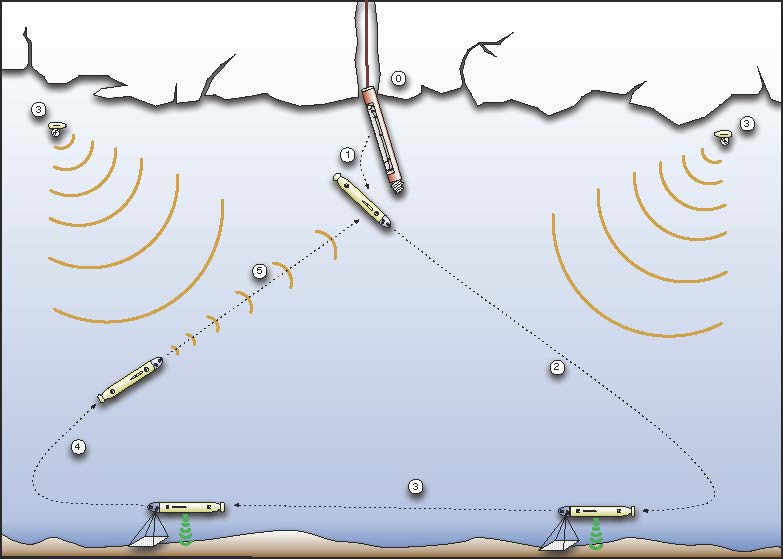
Das Projekt "EurEx-Sichere Langzeitnavigation" soll die Fähigkeiten von autonomen Systemen zur verlässlichen Navigation über lange Zeiträume verbessern. Dies ist eine Schlüsselfertigkeit um komplexe Missionen mit begrenzter Infrastruktur und Sensorik durchführen zu können. Das in diesem Vorhaben gewählte Szenario für die Evaluation der Navigationsfähigkeit ist eine Mission zum Jupitermond Euroa, dessen flüssiger Ozean mit Hilfe eines autonomen Unterwasserfahrzeuges exploriert werden soll. Während eine solche Mission noch in der Zukunft liegt soll in EurEx-SiLaNa als Teil der EnEx-Initiative ein weiterer Schritt zur Realisierung getan werden. Um dies zu erreichen ist die Vorbereitung einer Analogmission auf der Erde, in der die Machbarkeit des entwickelten Explorationskonzeptes nachgewiesen werden kann ein zentraler Teil dieses Vorhabens. Alle missionskritischen Aspekte sollen weiterentwickelt werden. Dies umfasst die Bereich Unter-Eis-Navigation, Autonomie sowie die Verbesserung der Robustheit der Technologiedemonstratoren Leng und Teredo.