
Exoskelett und Steuerung der Teleoperation
Ein Hauptziel im VI-Bot Projekt stellt die Entwicklung des intrinsisch sicheren, tragbaren Exoskeletts dar, um die Bedienbarkeit eines robotischen Zielsystems zu erhöhen und dessen intuitive Teleoperation zu ermöglichen. Dabei besteht die technische Neuheit, die das VI-Bot Projekt liefern wird, aus der Kombination einer – auf den menschlichen Körper zugeschnittenen – kinematischen Struktur, des nachgiebigen, reaktiven Aktuationssystems, und dessen Regelung, basierend auf einem bio-inspirierten Ansatz.
Dank der hohen Dynamik des Antriebssystems ist das haptische Interface in der Lage, dem Operator ein präzises, multipunktuelles haptisches Feedback zu geben. Außerdem wird eine Kompensation der Massenträgheiten des Exoskeletts ermöglicht. Der Benutzer erfährt eine neue Qualität der Immersion in das Anwendungsszenario.Das zweite Ziel im VI-Bot Projekt besteht in der flexiblen Kopplung des Exoskeletts mit unterschiedlichen robotischen Zielsystemen.
Designprozess
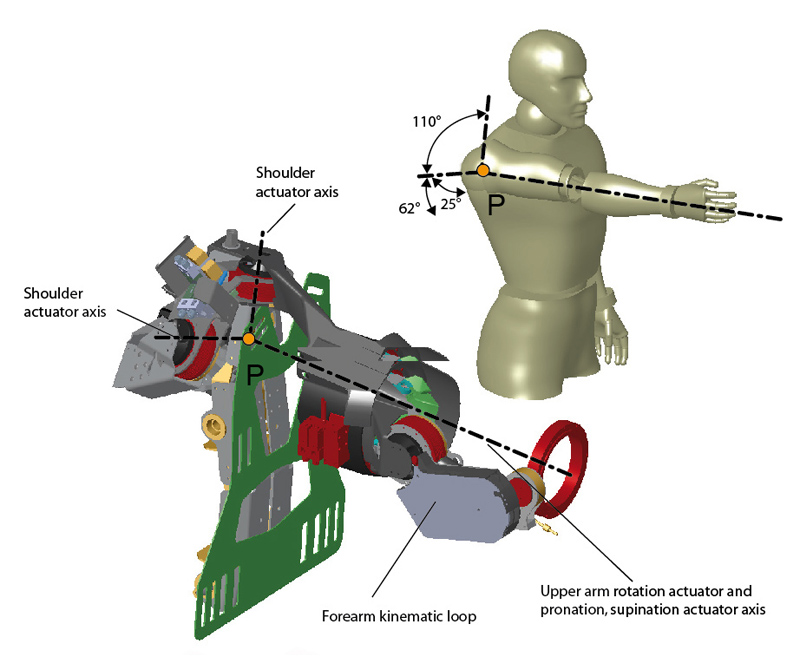
Das Design und die Berechnung der kinematischen Struktur des VI-Bot Exoskeletts wird durch eine Kombination modellbasierter Techniken mit Daten aus der Bewegungsanalyse erreicht (Abb. 1). Dabei werden die Bewegungen des Operators über die Sensoren eines Prototypen des Exoskeletts, als auch mit einem Motion-Tracking-System erfasst und anschließend ausgewertet. Das kinematische Modell wird daraufhin angepasst und so der Arbeitsbereich der mechanischen Verbundstruktur aus menschlichem Arm und Exoskelett verbessert (Abb. 2).

Aktuationskonzept
Aufgrund der Notwendigkeit unbedingter Sicherheit des Benutzers im Zusammenspiel mit dem aktiv aktuierten Exoskelett wird ein Sicherheitsmechanismus benötigt, der die maximal auf den Benutzer einwirkende Kraft beschränkt. Dies wird ermöglicht, indem jedes Gelenk mit einem speziellen, geeigneten Antriebssystem ausgestattet wird, das die spezifische Impedanz des Gelenks regulieren kann. Die derzeit erhältlichen Antriebe konnten die Forderung nach großer Kraftentwicklung bei gleichzeitig kleiner Baugröße und der Möglichkeit der Impedanzregulierung nicht erfüllen. Deshalb wird im VI-Bot Projekt eine neuer Aktuatortyp entwickelt.
Hydraulische Antriebe haben gegenüber elektrischen Motoren Vorteile wie etwa ein besseres Verhältnis von Kraft zu Gewicht, keine Notwendigkeit eines Getriebes, schnellere Ansprechzeiten, eine präzisere Positionsregelung und ein kleinere Baugröße. Der neue VI-Bot Aktuatortyp kombiniert einen hydraulischen mit einem pneumatischen Antrieb: Um die Steifigkeit des Antriebssystems herabzusetzen, wird ein pneumatisches Federelement in Serie mit einem hydraulischen Aktuator verbaut (Abb. 3).

Regelungssystem
Dadurch, dass das VI-Bot Exoskelett sowohl im ständigen direkten physischen Kontakt mit dem menschlichen Benutzer, als auch im ständigen virtuellen Kontakt mit einem teleoperierten robotischen System steht, muss ein geeignetes Regelungssystem entwickelt werden: Dieses sorgt für die Regelung sowohl der räumlichen Konfiguration als auch der Steifigkeit, die dem Benutzerverhalten entgegengebracht wird.
Falls das teleoperierte System eine unerwartete Kraft in das Exoskelett induziert, ist ein Sicherheitsmechanismus notwendig, der die unmittelbare Übertragung über das haptische Interface, das Exoskelett, auf den Nutzer verhindert. Dabei ist es unbedingt erforderlich, dass dieser Sicherheitsmechanismus unabhängig von Software- oder Hardwarefehlern greift.
Aufgrund verschiedener Faktoren im Zusammenspiel mit dem Exoskelett (das nichtlineare Verhalten des pneumatischen Federelements und des hydraulischen Aktuators, als auch die Interaktion von Operator mit dem Exoskelett) verhält sich das zu regelnde System nichtlinear. In diesem Fall bieten klassische Regelungsansätze nur begrenzte Möglichen, deshalb werden im Rahmen des VI-Bot Projekts neue Regelungsansätze erforscht und in die Praxis umgesetzt.
Der dabei verfolgte Ansatz basiert auf dem derzeitigen Wissensstand der Neurobiologie: die Struktur spezieller neuronaler Schaltkreise, wie sie in den Nervenbahnen des menschlichen Rückenmarks zu finden sind und die unter anderem die Position sowie die Kraft menschlicher Muskeln steuern und regeln, werden hier imitiert und an das VI-Bot System angepasst. Das Schema in Abbildung 4 zeigt einen ersten Ansatz, diese Regelungsstruktur nachzubilden, indem verschiedene Strategien kombiniert werden:
- Positionsregelung
- Kraftregelung
- Regulierung der Steifigkeit
- Sicherheitsmechanismen
Die unterschiedlichen Regelkreise können sich durch die parallele Struktur eines künstlichen neuronalen Netzes gegenseitig überlagern und so eine bestmögliche Regelung ermöglichen.
Kinematik, Dynamik & Kopplung
Für den Einsatz des Exoskeletons als Kontrollinstrument zur Teleoperation wird es mit einem zweiten Robotersystem, das die eigentlichen Manipulationsaufgaben am tatsächlichen Arbeitsort übernimmt, gekoppelt. Diese Kopplung stellt eine bidirektionale, kontinuierliche, nichtlineare Abbildung zwischen den Bewegungs- und Krafträumen der beiden Systeme dar.
Eine systematische Modellierung von Vorwärts- und Rückwärtskinematik und Vorwärts- und Rückwärtsdynamik, sowohl für das mechanische Verbundsystem - bestehend aus menschlichem Arm und Exoskelett, als auch für das teleoperierte, robotische System - bilden zentrale Voraussetzungen, um eine mächtige, praxistaugliche Kopplung zwischen Operator- und Manipulationssystem herzustellen.
Dabei müssen sich alle Berechnungen, die sich aus den Modellen ergeben, unter Echtzeitanforderungen lösen lassen. Die Entwicklung der Modelle und ihrer Berechnungsalgorithmen sind zentrale Aufgaben, die im VI-Bot Projekt gelöst werden.
Aufbauend auf diesen Berechnungen wird im VI-Bot Projekt eine adaptierbare Teleoperationsabbildung entwickelt, die sich an unterschiedliche Einsatzszenarien anpassen lassen wird.