Phobos
Ein Blender-Add-On zum Editieren und Export von Robotermodellen für die MARS-Simulation
| Internetseite: | https://github.com/rock-simulation/phobos |
| Schlüsselwörter: | Simulation, Robotermodell, Modellierung |
| Status: | aktiv |
| Betriebssystem: | Linux, Mac OS, Windows |
| Programmiersprachen: | Python 3 |
| Lizenz: | LGPL3 |
| Eigentumsrechte: | Diese Software wurde vom DFKI sowie von der Arbeitsgruppe Robotik der Universität Bremen entwickelt und wird unter dieser Verantwortung weiterentwickelt. Bei Fragen und Anregungen wenden sie sich an die Ansprechpartner. |
Softwarebeschreibung
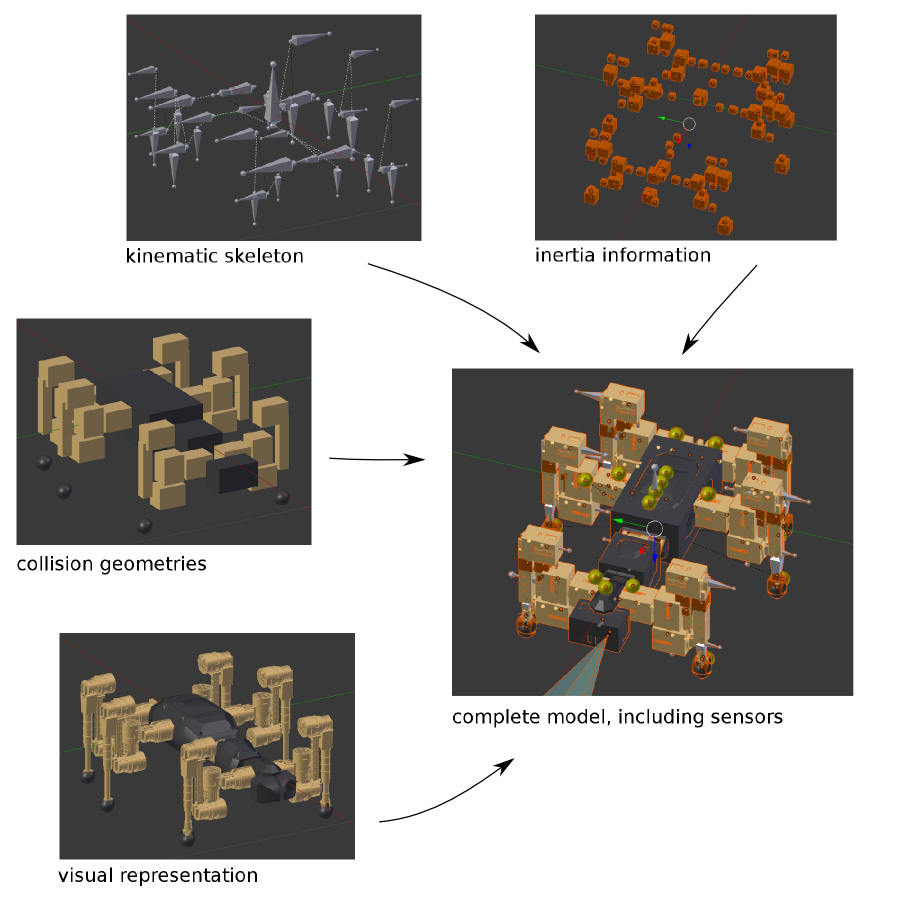
Phobos verwendet Blenders hierarchischen Objektgraphen und seine Bone-Objekte. Diese Objekte, die gewöhnlich für die Animation von 3D-Charakteren verwendet werden, erlauben es, 3D-Koordinatensysteme zu speichern und Bewegungsfreiräume zu definieren, z.B. um die Bewegung eines Objekts auf eine bestimmten Winkelbereich auf einer definierten Achse zu beschränken. Dadurch ist es möglich, Links und Joints eines URDF-Modells darzustellen, sodass zusammen mit dem hierarchischen Baum aus Eltern- und Kindbeziehungen die vollständige, verzweigte kinematische Kette eines Roboters repräsentiert werden kann.
Indem Primitive oder Meshes an die Bone-Objekte angehängt werden, können Informationen über Visualisierung und Kollision zu einem Modell ergänzt werden. Zusätzliche Objekte speichern z.B. Massenschwerpunkte der einzelnen Roboterteile, sodass eine korrekte physikalische Repräsentation erzeugt werden kann. Sensorobjekte können hinzugefügt werden, um Geräte wie Laserscanner, Kameras oder Kontaktsensoren korrekt zu platzieren und orientieren.
Durch die Verwendung von Blenders frei definierbaren Objekteigenschaften können jegliche weitere Daten zum Modell hinzugefügt werden, vom Trägheitstensor bis hin zum Öffnungswinkel von Kameras.
Features
- Modell-Fehlerprüfung
- Editieren von Eigenschaften mehrerer Objekte gleichzeitig
- Messung von Distanzen und Massen
- Synchronisation von Masseninformationen zwischen verschiedenen Modellebenen
- Automatische Generierung von Kollisionsobjekten
- Automatische näherungsweise Generierung von Trägheitstensoren, Verrechnung manuell hinzugefügter exakter Trägheitsdaten
- Online-Definition und -Test von Gelenk-Arbeitsräumen
- Import und Export verschiedener Modellformate
