SVEnnI
Service Vehicle Engineered for non-contact Inspection

Technische Details
| Größe: | 85x55x70 cm |
| Gewicht: | 18kg |
| Stromversorgung: |
24V 8Ah Akkupack aus Hawker-Cyclon 2V 8Ah Blei-Gel Akkus
|
| Antrieb/ Motoren: |
2x Faulhaber 24V
|
| Sensoren: |
Drucksensor, Temperatursensor, Digitale Videokamera, Laserscanner
|
Organisatorische Details |
|
| Anwendungsfelder: | Unterwasserrobotik |
| Verwandte Projekte: |
SVEnnI
Service Vehicle Engineered for non-contact Inspection
(12.2007- 04.2008)
SVEnnI
Service Vehicle Engineered for non-contact Inspection
(12.2007- 04.2008)
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung

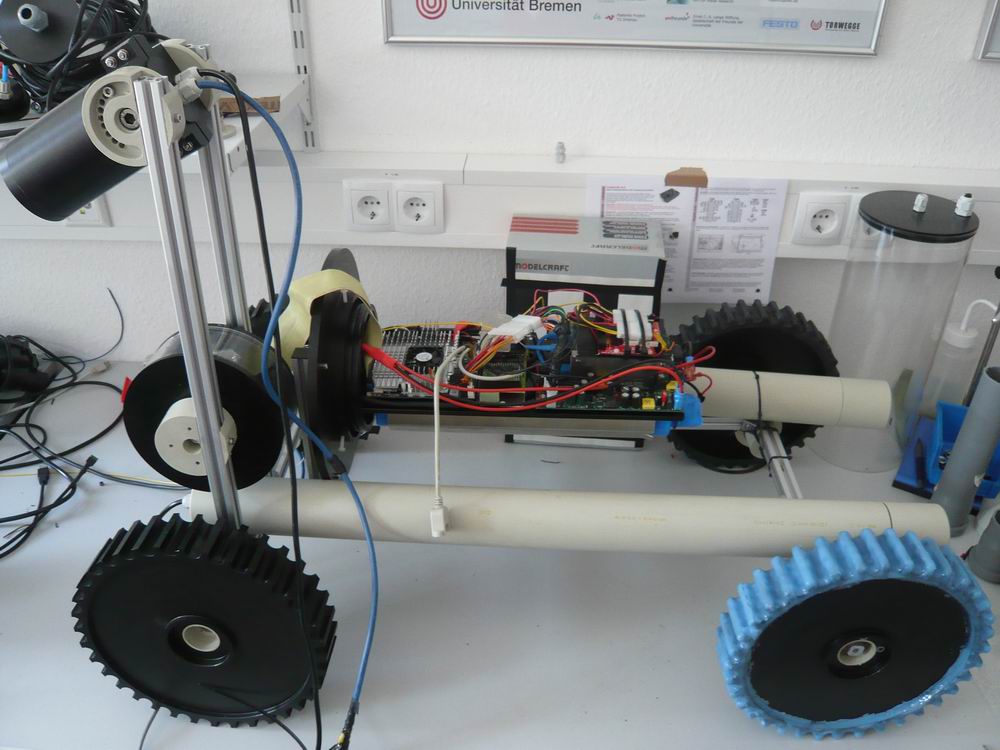

SVEnnI ist ein Inspektionsfahrzeug für enge Räume, wie z.B. Rohr- und Tunnelsysteme oder andere geflutete Bauwerke. Hauptziel bei der Entwicklung war, einen Technologieträger zur Verfügung zu stellen, um neue Konzepte für diesen Einsatzbereich bereits im Vorfeld erproben zu können. Das Fahrzeug trägt dazu seine eigene Energieversorgung in Form von Blei-Gel Akkus; Es handelt sich also um ein hybrides (autarkes) ROV (Remotely Operated Vehicle)-System. Die Kommunikation findet mittels eines extrem dünnen und widerstandsfähigen Glasfaserkabels statt. Dadurch kann die notwendige hohe Einsatzreichweite erreicht werden. Das Kommunikationskabel befindet sich auf dem Fahrzeug im aufgewickelten Zustand und wird beim Einsatz passiv abgespult. So entsteht kein Zug auf der Leitung, welcher zu einem Abriss führen könnte. Dadurch, dass das Kabel abgezogen wird, wird die Einsatzfähigkeit in unzugänglichen Regionen ermöglicht ohne dass das Fahrzeug in der Steuerung vom zu ziehenden Kabel beeinflusst wird.
Verhakt sich das Kabel, so dass es nach dem Einsatz vom Operator nicht wieder nachträglich herausgezogen werden kann, so ist dieses als Verschleißmaterial zu betrachten und dieses auch so, vor dem Einsatz für die Kosten zu kalkulieren. Technisch ist das vorgesehene Kabel mehrfach verwendbar.
Die Steuerung findet durch einen Operator statt. Für den Benutzer ist eine wasserdichte Kamera installiert, so dass dieser optische Inspektionen durchführen kann, welche zur Dokumentation extern gespeichert werden. Als Sensoren stehen ein klassischer Druck- und Temperatursensor auf dem System zur Verfügung. Zusätzlich besitzt SVEnnI ein Laserscannsystem, welches bei geeigneter (geringer) Trübung eine 3D-Vermessung ermöglicht.