SherpaTT

Technische Details


Systembeschreibung

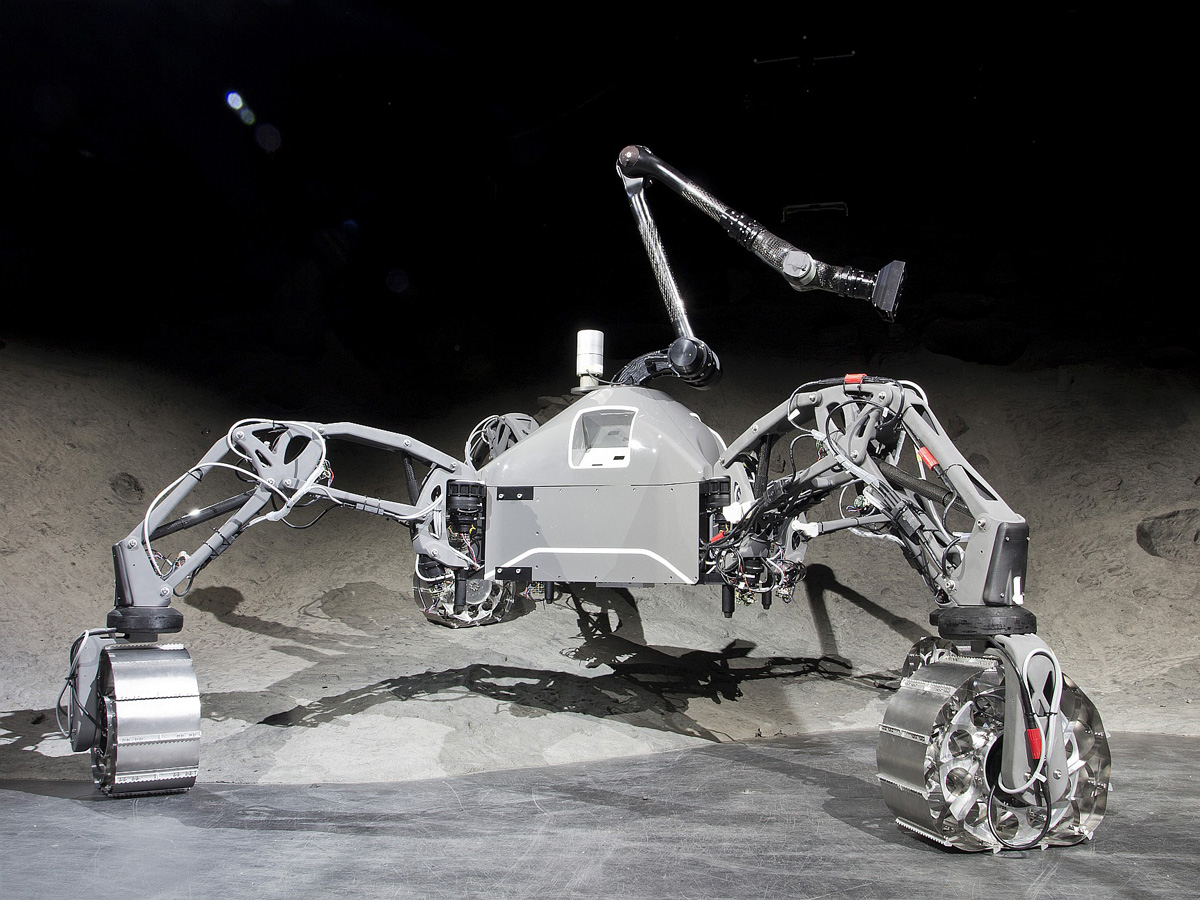

SherpaTT ist ein hybrider Schreit-Fahrrover mit einem aktiven Fahrwerk für hohe Geländegängigkeit. Interne Energieversogrung (2x 10.000 mAh@44.4 V), Lidarsensor, Kamera, Laserscanner und der zentrale Manipulatorarm erlauben die Durchführung autonomer Explorationsaufgaben. Durch die Ausrüstung mit 6 standardisierten elektro-mechanischen Schnittstellen, eine davon als Manipulationsinterface des Armes, kann der Roboter an unerschiedliche Aufgaben angepasst werden, z.B. durch ein Probennahmemodul Bodenproben einsammeln und seinem Team-Partner Coyote III übergeben. Das Gesamtgewicht des Roboters inklusive Manipulatorarm liegt bei rund 150kg. Aufgrund der selbsthemmenden Getriebe im Fahrwerk sind hohe Nutzlastzuladungen möglich, ohne dass der Energiebedarf für die Einhaltung einer Körperhaltung nennenswert steigt.
SherpaTT wird im Rahmen des Projekts TransTerrA entwickelt, welches zum Ziel hat, eine logistische Kette, basierend auf einem heterogenen Team aus mobilen und stationären Robotern, zu errichten. Hierbei wird SherpaTT als Explorationsrover eingesetzt um größere Geländebereiche genauer zu erkunden und mit dedizierten Probennahmemodulen Gesteins- und Bodenproben zu sammeln und an den Shuttle Rover des robotischen Teams zu übergeben.
SherpaTT basiert auf den Erfahrungen des Sherpa-Rovers aus dem Projekt RIMRES. Insbesondere im Bereich des Fahrwerks wurden Verbesserungen aus den gesammelten Erfahrungen vorgenommen. So wurde ein Kniegelenk eingeführt, durch welches jetzt ein dreidimensionaler Arbeitsbereich des Fahrwerks möglich ist. Durch Prüfung der Verwendung einzelner Freiheitsgrade im ursptünglichen Design konnte für SherpaTT die Zahl der Freiheiten pro Bein (ein Element des aktiven Fahrwerks) von vorher sechs auf nun fünf reduziert werden, während der nutzbare Arbeitsraum signifikant gestiegen ist.
Neben dem primären Einsatzszenario zur Exploration extraterrestrischer Körper, kann SherpaTT auch für terrestrische Anwendungen zum Beispiel im Bereich der zivilen Sicherheit eingesetzt werden. Hier wäre ein Einsatz in Katastrophen Szenarien denkbar. Weiterhin wurde das Fahrwerk wasserdicht ausgelegt. Ein Wechsel des Zentralkörpers erlaubt so die Transformation des Systems zu SherpaUW, welcher beispielsweise bei der Prospektion von Manganknollenfeldern eingesetz werden könnte.
Videos
CoRob-X: DFKI testet Lavahöhlen-Erkundung durch autonome Roboterteams für zukünftige Mondmissionen
Lavahöhlen auf dem Mars und insbesondere auf dem Mond sind nicht nur für Exogeologen und andere Weltraumforscher interessant, sondern könnten auch als Lagerräume oder sogar als Lebensräume für künftige menschliche Siedlungen genutzt werden. Die Frage ist, wie diese riesigen Hohlräume unter der Mondoberfläche zugänglich gemacht und erforscht werden können, ohne das Leben der Astronauten zu riskieren.
Hier kommen Roboter, oder besser gesagt Roboterteams, ins Spiel. In Zukunft könnten mehrere kooperierende Roboter die Oberfläche über einer Lavaröhre erforschen und sogar die Höhle von innen betreten und erkunden. In CoRob-X haben wir in einer mondanalogen Mission auf Lanzarote demonstriert, wie das funktionieren könnte. Mit der gemeinsamen Anstrengung von Forschern aus fünf europäischen Mitgliedsstaaten und der Finanzierung durch das H2020-Programm der Europäischen Kommission hatten wir ein robotisches Explorationsteam aus drei autonomen Robotern entwickelt. Im Januar/Februar 2023 konnte das CoRob-X-Roboterteam alle vier Phasen einer Erkundungsmission in einer Lavaröhre auf dem Mond erfolgreich abschließen. Aber sehen Sie selbst...
SherpaTT: Rover-Test auf verschneitem Feld
Bremen war Anfang bis Mitte Februar mit Schnee bedeckt. Das Team, das mit SherpaTT arbeitet, nutzte dieses seltene Ereignis, um einige Experimente mit dem Rover im Schnee durchzuführen. Bei den Tests fuhr der Rover mehrere 10m lange Spuren durch unberührten Schnee, um das Feedback der internen Sensoren (Kräfte, Vibrationen, Strömungen) in dieser Umgebung zu messen. Die Experimente zeigen, wie SherpaTT den Schnee "fühlt".
Digitaltag 2021: Robotische Systeme im All – Laufroboter Mantis und Rover SherpaTT
Robotische Systeme im All – Laufroboter Mantis und Rover SherpaTT.
Wiebke Brinkmann und Tobias Stark, Forschungsbereich Robotics Innovation Center, live aus der Weltraum Explorationshalle, Aufzeichnung vom 18.06.2021, 11:30 – 12:00 Uhr
ADE: Letzter Feldtest in Wulsbüttel mit DFKI-Rover SherpaTT
Im Rahmen des von der EU geförderten und von GMV Aerospace and Defence koordinierten Weltraumprojekts ADE musste der Rover SherpaTT des DFKI Robotics Innovation Center eine lange Strecke autonom zurücklegen und dabei auf unerwartete Ereignisse reagieren. Ursprünglich auf Fuerteventura geplant, mussten die Tests aufgrund der Pandemie in die Sandgrube bei Wulsbüttel verlegt werden. Fast wie in Spanien, nur mit etwas anderen Wetterbedingungen.
ADE(OG10): Autonome Weltraumrobotik Navigationstests mit Rover SherpaTT auf der Galopprennbahn Bremen
SherpaUW: Tests mit hybridem Unterwasser-Rover in der Maritimen Explorationshalle
Field Trials Morocco: EU partner test new software with DFKI rover SherpaTT
Das von der Europäischen Union geförderte Strategic Research Cluster (SRC) on Space Robotics Technologies hat zum Ziel, bedeutende Fortschritte im Bereich der Weltraumrobotik zu erzielen. Die weltraumtauglichen Technologien werden u.a. für zukünftige Robotermissionen benötigt, um die Oberflächen von Mars, Mond und anderen Himmelskörpern zu erkunden. In der ersten Phase des SRCs (2016–2019) wurden in mehreren Forschungs- und Entwicklungsprojekten ("Operational Grants") Kerntechnologien für Weltraumroboter entwickelt. Da keine Laborumgebung die rauen Umgebungsbedingungen, mit denen die Systeme im All konfrontiert sind, angemessen simulieren kann, sind Feldtests in terrestrischen mars- oder mondanalogen Landschaften unerlässlich.
Field Trials Utah: Roboter-Team simuliert Marsmission in Utah
Eine karge, felsige Wüstenlandschaft und keine Menschenseele weit und breit – um den unwirtlichen Bedingungen auf dem Roten Planeten möglichst nahe zu kommen, testeten Wissenschaftler des Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) vom 24. Oktober bis 18. November 2016 die Kooperation verschiedener Robotersysteme in der Halbwüste des amerikanischen Bundesstaates Utah.
SherpaTT: Feldversuch in der Wüste Utahs in den USA
SherpaTT bei der Fahrt durch natürliches, Mars ähnliches Gelände in einem Feldversuch in der Wüste Utahs, USA. Dabei zeigt SherpaTT seine Fähigkeit mittels aktiven Fahrwerk auch große Unebenheiten ausgleichen zu können.
SherpaTT in Außentests
SherpaTT zeigt seine Fähigkeit mittels aktiven Fahrwerk auch große Unebenheiten ausgleichen zu können.