Sherpa
Expandable Rover for Planetary Applications

Technische Details
| Größe: | Variabel: Standard-Pose Footprint: 240cmx240cm, Bodenfreiheit ca. 50cm, Höhe Turm 120cm. Länge ausgestreckter Manipulator: ca. 180cm |
| Gewicht: | ca. 200kg |
| Stromversorgung: |
Lithium Polymer Akkus 48.8V Nennspannung
|
| Antrieb/ Motoren: |
Bürstenlose DC Motoren mit speziell entwickelter Kontroll-Elektronik auf FPGA-Basis
|
| Sensoren: |
Stereokamera+Laserscanner vorne,
Einzelkamera+Laserscanner hinten,
Einzelkameras an den Seiten;
Eigenentwickelte Kraft-Momenten-Sensoren an den Schwenkeinheiten
IMU zur Lageerkennung Positions-, Geschwindigkeits-, Strom- und Temperatursensoren in jedem Gelenk
|
| Anzahl Freiheitsgrade: |
Insgesamt 30 DOF: 4DOF pro Schwenkeinheit + 2 DOF pro Rad (4 Schwenkeinheiten mit montierten Rädern) und 6DOF Manipulatorarm
|
Organisatorische Details |
|
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
TransTerrA
Semi-autonomous cooperative exploration of planetary surfaces including the installation of a logistic chain as well as consideration of the terrestrial applicability of individual aspects
(05.2013- 12.2017)
TransTerrA
Semi-autonome kooperative Exploration planetarer Oberflächen mit Errichtung einer logistischen Kette sowie Betrachtung terrestrischer Anwendbarkeit einzelner Aspekte
(05.2013- 12.2017)
|
| Verwandte Software: |
MARS
Machina Arte Robotum Simulans
Phobos
An add-on for Blender allowing editing and exporting of robots for the MARS simulation
NDLCom
Node Level Data Link Communication
Rock
Robot Construction Kit
MARS
Machina Arte Robotum Simulans
NDLCom
Node Level Data Link Communication
Phobos
Ein Blender-Add-On zum Editieren und Export von Robotermodellen für die MARS-Simulation
Rock
Robot Construction Kit
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung
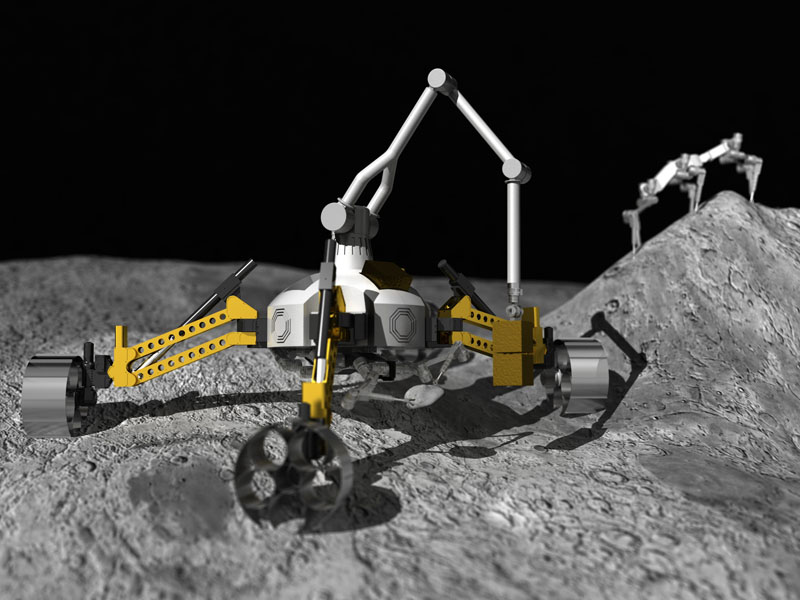
Sherpa ist ein Rover mit aktivem Fahrwerk. Dies bedeutet, dass der Roboter zum einen die relativ energieeffiziente radgetriebene Fortbewegung nutzen kann, sich zum anderen aber hochflexibel an verschiedene Gelände- und Hindernissituationen anpassen kann.
Der Manipulatorarm dient mehreren Zwecken: Im Rahmen des RIMRES-Projektes werden die Nutzlasteinheiten gehandhabt und zu modularen Nutzlasten zusammengebaut. Weiterhin kann die im Arm befindliche Kamera eingesetzt werden, um einem Operator die Möglichkeit zur Überwachung des Systems zu geben. Als drittes Einsatzgebiet kann der Manipulator zur Unterstützung der Lokomotion in besonders schwierigen Situationen genutzt werden.
Videos
Sherpa: Lifting
Sherpa nutzt seinen Manipulatorarm um sich abzustützen, während er zwei Beine anhebt
Sherpa: Stepping over
Sherpa nutzt den Manipulator, um ein Hindernis zu überwinden
Sherpa: Stacking camera payload
Der Rover Sherpa baut einen Payloadstack aus zwei einzelnen Payload-Items zusammen und setzt ihn auf der Oberfläche ab.
Sherpa: Ausbaufähiger Rover for planetarische Anwendungen
Das Video zeigt die Rolle von Sherpa im Projekt RIMRES und die ersten Eindrücke der Flexibilität der Lokomotion des Systems.