BRIO Labyrinth
Testbed für die Entwicklung von Lernarchitekturen

Ansprechpartner/in:
Technische Details
Systembeschreibung
Das BRIO Labyrinth ist ein Geschicklichkeitsspiel, das Konzentrationsfähigkeit, Koordination, Wahrnehmung und Feinmotorik fordert. Durch das Drehen zweier Drehköpfe wird eine Spielplatte in zwei Ebenen geneigt und eine Stahlkugel durch das Labyrinth gesteuert. Je weiter die Kugel rollt, desto höher ist die erreichte Punktezahl. Daher gilt es, Löcher zu vermeiden. Für das Testbed BRIO Labyrinth wurde das Spiel wie folgt umgebaut und erweitert:
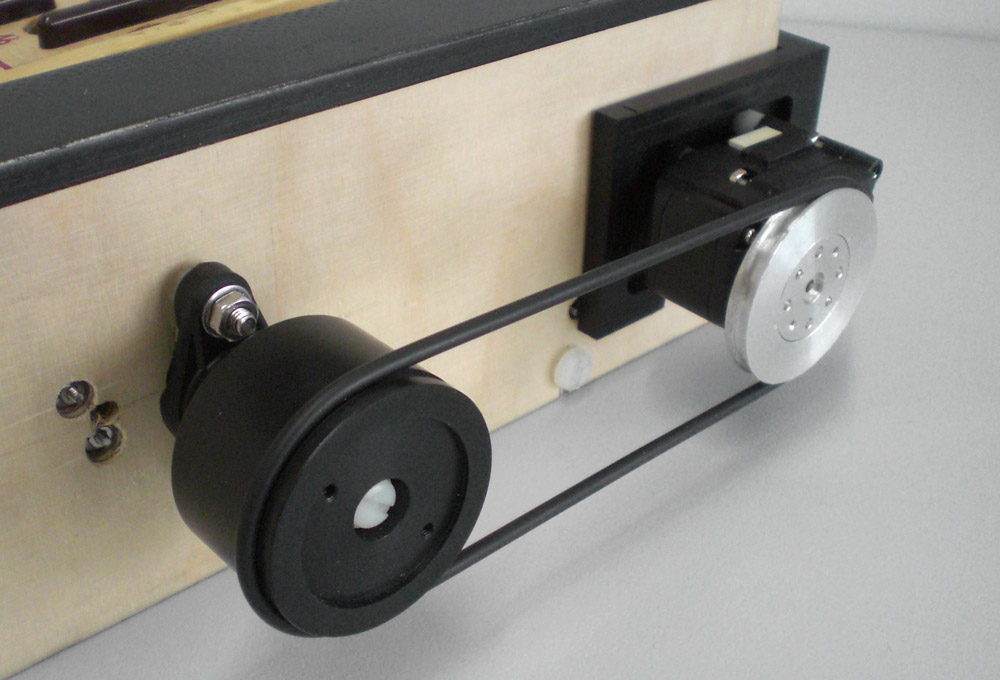
- Zwei modular montierbare Servomotoren können mit den Drehknöpfen gekoppelt werden und ermöglichen so die indirekte Ansteuerung des Spiels mit Hilfe eines Joysticks sowie in Zukunft potentiell in einer virtuellen Umgebung über ein Display. Vier Schnappschalter begrenzen den Arbeitsbereich der Spielfläche in beiden Dimensionen und ermöglichen eine Kalibrierung der Nullposition der Servomotoren.
- In Verbindung mit einer Kamera, die die Spielfläche erfasst, können die Servomotoren von künstlichen Agenten angesteuert werden. Hierfür werden bildverarbeitende Algorithmen zur Lokalisation der Kugel genutzt. Winkelgeber erfassen die Drehungen der Achsen. Die Sensordaten der Winkelgeber und der Kamera repräsentieren zu jedem Zeitpunkt den Zustand des Systems und erlauben dem virtuellen Agenten, das System zu kontrollieren. Zusätzlich dienen diese Sensoren der Aufzeichnung des Verhaltens der Probanden. Die Verhaltensdaten können für die Auswertung von aufgezeichneten EEG- und fMRI-Daten herangezogen werden.
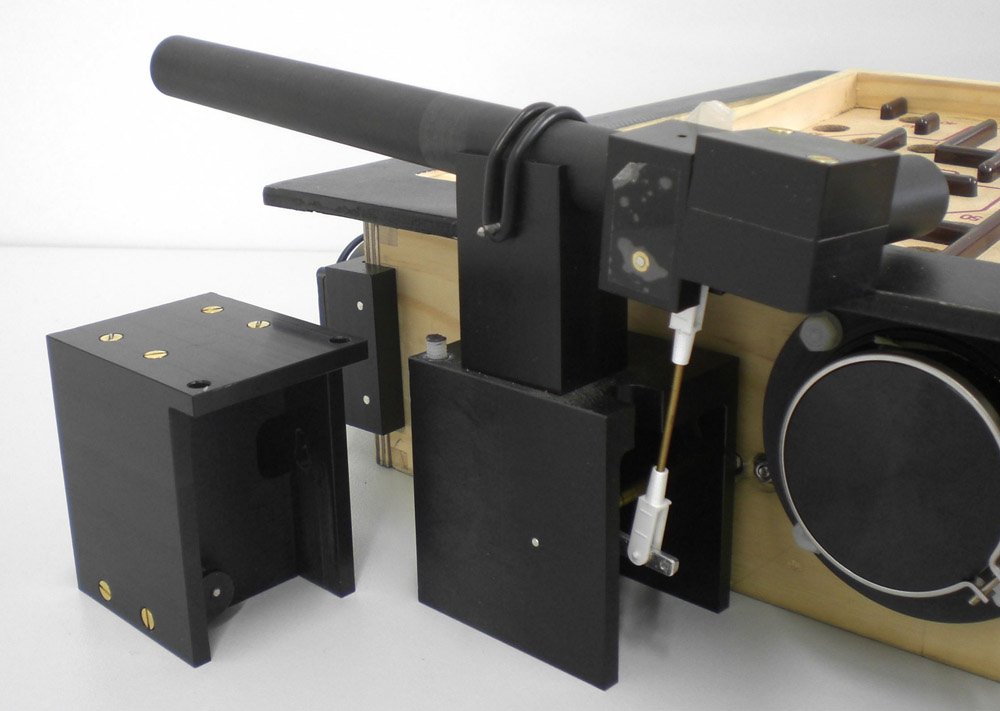
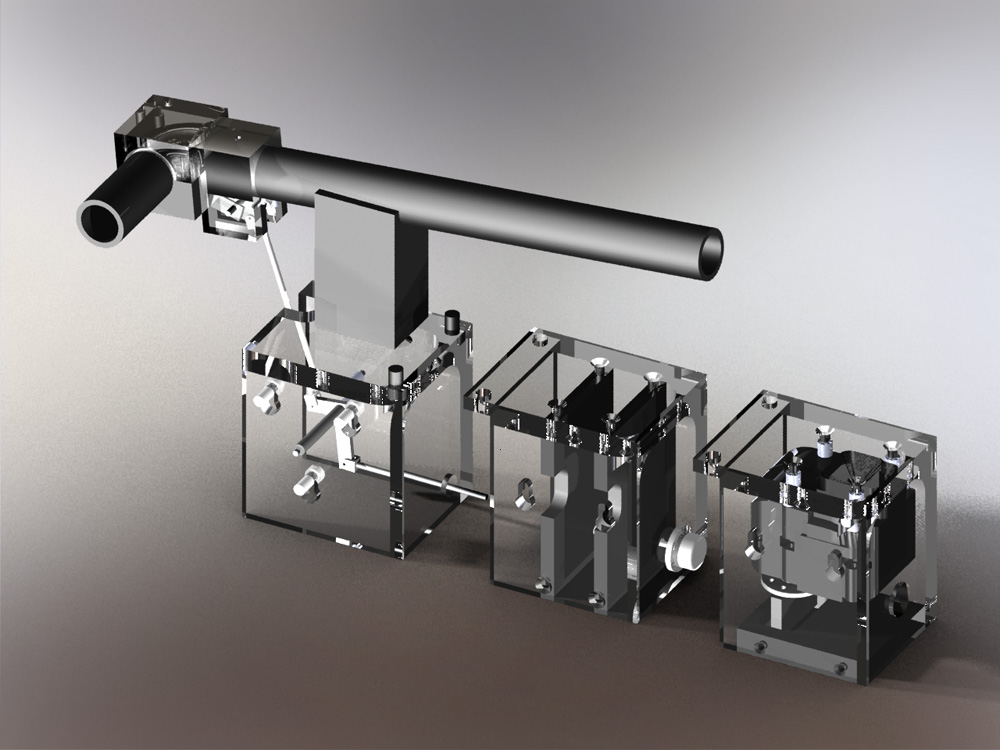
- Ein Piezo-Sensor an der Unterseite des Spiels kann Erschütterungen registrieren, die auftreten, wenn die Kugel durch eines der Löcher fällt. Ein modulares Ballmagazin wurde entwickelt, das in diesem Fall sowohl auf Knopfdruck als auch automatisiert für den Agenten in kurzer Abfolge bis zu 14 Kugeln bereitstellen kann.
- Sämtliche magnetische Originalteile wurden durch nichtmagnetische Teile ersetzt, um den Einsatz des Systems bei fMRI-Untersuchungen zu ermöglichen. Hierfür kann auch die Stahlkugel durch Kugeln aus nichtmagnetischen Materialien wie Keramik oder Messing ersetzt werden.
- Eine blinkende LED, deren Aufleuchten von der Kamera erkannt wird, kann zur Synchronisation von Verhaltens- und EEG/fMRI-Daten genutzt werden und erlaubt eine Gegenüberstellung der beim Spielen beobachteten Verhaltensweisen eines Probanden und eines künstlichen Agenten.
Videos
BRIO Labyrinth: Entwicklung von Lernarchitekturen und Experimenten für sensormotorisches Lernen
Das BRIO Labyrinth Spiel wird als Testbett für neurobiologische Studien zum sensorimotorischen Lernen genutzt.
BRIO Labyrinth: Erlernte Strategie
Simulation der erlernten Strategie beim BRIO Labyrinth.
BRIO Labyrinth: Gedanken Lesen (Demonstration)
In einem Telemanipulationsszenario