AVALON
Autonomous Vehicle for Aquatic Learning, Operation and Navigation

Technische Details
| Größe: | 24,6cm Durchmesser, 1,35m Länge |
| Gewicht: | 60 kg |
| Stromversorgung: |
26,4V 40Ah (8x LiFe 3,3V) ~10h Betriebsdauer
|
| Antrieb/ Motoren: |
5 x SeaBotix BTD150, 1 x Eigenherstellung (120W)
|
| Sensoren: |
1 x Prosilica GC650C (nach vorne gerichtet),
1 x Prosilica GC2450C (nach unten gerichtet),
2 x The Imaging Source DFK 72BUC02 USB CMOS Color (Stereo-Kamera-System variabel nach unten oder nach oben gerichtet),
1 x Sensortechnics CTE8016GY7,
2 x Tritech Micron DST Scanning Sonar,
1 x Xsens MTi Inertialmesseinheit,
1 x Eigenherstellung FOG (Fibre Optic Gyro): KVH DSP-3000,
2 x Interne Temperatursensoren,
2 x Interne Drucksensoren,
1 x Batterieüberwachungssystem,
1 x Grüner Linienlaser,
1 x Tritech Echo Sounder,
6 x Stromüberwachung aller Motoren,
6 x Wassereinbruchsensoren
|
| weiteres: |
1 x Tritech MicroNav Modem, 9 x High-Power LEDs zur Statussignalisierung und Beleuchtung, 1 x PC- Unabhängige Operator Controll Einheit (OCU) zur direkten Steuerung
|
Organisatorische Details |
|
| Anwendungsfelder: | Unterwasserrobotik |
| Verwandte Projekte: |
CUSLAM
Localization and mapping in confined underwater environments
(09.2009- 07.2012)
IOP
Inspection of offshore pipelines
(12.2010- 07.2011)
FlatFish
Autonomous underwater vehicle
(11.2013- 06.2017)
CUSLAM
Lokalisierung und Kartenerstellung in beengten Unterwasserumgebungen
(09.2009- 07.2012)
FlatFish
Autonomes Unterwasserfahrzeug
(11.2013- 06.2017)
IOP
Inspektion von Offshore-Pipelines
(12.2010- 07.2011)
|
| Verwandte Software: |
MARS
Machina Arte Robotum Simulans
Rock
Robot Construction Kit
MARS
Machina Arte Robotum Simulans
Rock
Robot Construction Kit
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung
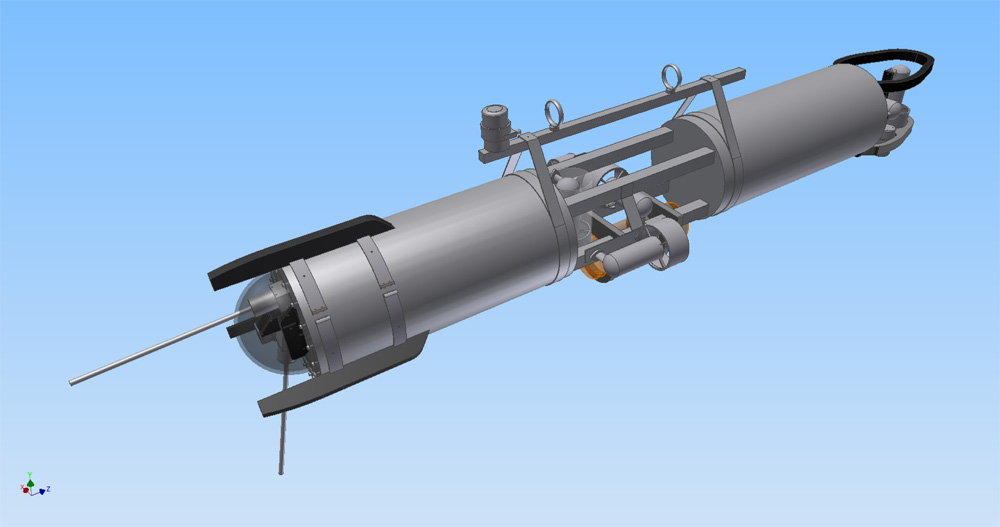

Das mit nur 1,35 Meter Länge und einem Durchmesser von 24,6 Zentimetern sehr kleine AUV "Avalon" (Autonomous Vehicle for Aquatic Learning, Operation and Navigation) ist dank seiner kompakten Bauweise bestens für den Einsatz in engen, hindernisreichen Gewässern geeignet, und bleibt dabei aufgrund seines Gewichts von etwa 60 Kg unempfindlich gegenüber Strömungen und Turbulenzen. Es erreicht aufgrund seiner 6 SeaBotix Thruster eine Höchstgeschwindigkeit von ca. 2 Metern die Sekunde, besitzt dadurch aber auch eine erstaunliche Beweglichkeit, die es ihm ermöglichen, filigrane Aufgaben zu bewältigen. Dank seines robusten Druckkörpers erreicht Avalon eine Tauchtiefe von 150 Metern. Zwei LED-Lampen mit jeweils einer Leistung von 800 Lumen ermöglichen es dem Avalon des weiteren sich auch in dunkleren Bereichen visuell zu orientieren.
Das "Gehirn" des Avalons besteht aus zwei Computer-Systemen, nämlich einem Mini-ITX mit einem Intel P9700 low power Dual-Core 2.8GHz Prozessor und 4 GB RAM und einem Mini-ITX System mit Intel Core i7-640M Prozessor. Ersterer ist verbunden mit zwei Festplatten (64GB und 500GB) und kümmert sich vor allem um die Computer-Vision, sprich Objekterkennung und Lagebestimmung. Die Aufgaben des zweiten Computers liegen dagegen bei niederen Kontrollaufgaben, den Sensor-Schnittstellen und Bereichen der Kommunikation.
Um seine Umgebung wahrzunehmen besitzt Avalon eine Anzahl verschiedener Sensoren. So wurden zur visuellen Erfassung insgesamt 4 Kameras angebracht. Im Frontbereich befindet sich hierbei eine Kamera (GC650C) der Firma Prosilica, welche zum Erkennen von Objekten vor dem Avalon eingesetzt wird. Sie besitzt laut Herstellerangaben eine Auflösung von 659 x 493 Pixel und liefert 90 Frames die Sekunde. Eine zweite Kamera der Firma Prosilica wurde unterhalb des Avalons angebracht. Die GC2450C wird ebenfalls zur Objekterkennung eingesetzt, wobei sie mit ihrer Auflösung von 2448 x 2050 Pixel und einer Übertragung von 15 Frames pro Sekunde für Aufgaben unterhalb des Fahrzeuges eingesetzt wird. Zwei weitere Kameras wurden uns von der Firma The Imaging Source zur Verfügung gestellt und in Form eines Stereo-Kamera-Systems, welches sowohl nach unten, als auch nach oben ausgerichtet werden kann, im Avalon integriert. Beide Kameras sind vom Typ DFK 72BUC02 und besitzen jeweils eine Auflösung von bis zu 2592x1944 Pixel und eine Übertragungsrate von maximal 52 Frames pro Sekunde.
Neben der visuellen räumlichen Erfassung besitzt das Avalon auch zwei Scanning Sonar (Micron DST) der Firma Tritech. Angebracht auf und am Ende des Fahrzeuges liefern diese sequenzielle 2D Rundumscans, woraus sich im einfachsten Anwendungsfall eine zweidimensionale Karte der Umgebung erstellen lässt.
Zur räumlichen Orientierung und Navigation greift Avalon auf drei weitere Sensoren zurück. Zur Tiefenbestimmung wird dabei ein Druckmesser (CTE8016GY7) der Firma Sensortechnics eingesetzt. Dieser misst 16 Mal die Sekunde den Druck der Wassersäule über dem Fahrzeug, um die aktuelle Tauchtiefe zu ermitteln. Die Abweichung beträgt dabei maximal 0,5cm. Zur weiteren Positionsbestimmung werden als Sensoren ein IMU (Inertial Measurement Unit) und ein FOG (Fibre Optic Gyro) eingesetzt. Der verwendete IMU dient dabei der Messung translatorischer und rotatorischer Beschleunigungskräfte und liefert im normalen Modus die räumliche Orientierung des Fahrzeuges. Um hierbei exaktere Ergebnisse zu bekommen, werden beim Avalon die Messwerte der IMU mit denen des FOG fusioniert. Die im Fahrzeug eingebaute IMU wurde vom DFKI entwickelt und besteht aus 3 Beschleunigungsmessern, 3 Drehsensoren (Gyros) und 3 Magnetsensoren. Der verwendete FOG (Intelligent Fibre-Optic Gyro (iFG)) stammt von der Firma Tritech verwendet. Dieser liefert sehr präzise Rotationsinformationen des Fahrzeuges, wobei es sich bei der im Avalon eingesetzten Variante um ein 1D Modell handelt, welches die 5 Rotationen in nur einer Ebene (beim Avalon wurde dabei Nord/Süd Drehachse gewählt) genau bestimmen kann.
Neben den hier aufgeführten Sensoren besitzt Avalon des weiteren einen grünen Linienlaser, welcher im Frontbereich des Avalons eingebaut ist. Dieser ermöglicht es mit Hilfe eines einfachen Linienschnittverfahrens eine Distanz- und Relativmessung durchzuführen. Die Ausrichtung des Laserstrahls wird dabei durch einen Servo Motor (Dynamixel DX112) der Firma Robotis durchgeführt. Erfasst wird dieser durch die Frontkamera.
Als letzte Komponente soll das MicroNav Modem der Firma Tritech erwähnt werden. Es wird für die Remote Übertragung von Start- and Stop-Kommandos des AUV genutzt und besitzt eine Übertragungsrate von 30 Zeichen pro Sekunde ohne Protokoll/Checksums.
Videos
AVALON: Autonome Mission
Das Robotersystem AVALON erfüllt ohne externe Kommunikation oder Steuerung mehrere Aufgaben.
AVALON: Video-Diary
AVALON während der SAUC-E 2011, die mechanische Neugestaltung des hinteren Bereichs und eine Demonstration der autonomen Fähigkeiten.
AVALON: Laserscanner und autonome Tiefenkontrolle
Beispielbilder mit dem Laser Scanner sowie autonome Tiefenkontrolle.
AVALON: Übersicht und Bewegungsfähigkeiten
Eine Darstellung des AUV AVALON und seiner Fähigkeiten.