ASGUARD I
Advanced Security Guard V1

Technische Details
| Größe: | 95cm x 54cm x 42cm |
| Gewicht: | 9,5 kg |
| Stromversorgung: |
Lithium-Polymer Akkumulator – 32V 10Ah
|
| Antrieb/ Motoren: |
4 x 80 Watt Faulhaber DC Motoren – Planetengetriebe 46:1
|
| Sensoren: |
Motorencoder, Stromsensoren
|
Organisatorische Details |
|
| Anwendungsfelder: | SAR- & Sicherheitsrobotik |
| Verwandte Projekte: |
SentryBot II
An Autonomous, Co-Operative Multi-Robot System for Security and Surveillance
(06.2007- 12.2007)
SentryBot II
Ein autonomes, kooperatives Mehrrobotersystem für Sicherheit und Objektschutz
(06.2007- 12.2007)
|
| Dieses System ist nicht mehr aktiv im Einsatz. | |
Systembeschreibung


Die Fortbewegung von mobilen Robotern im Außenbereich stellt verschiedenste Anforderungen an das System. Zum einen muss ein Outdoor-Roboter schnell und agil sein, zum anderen soll ein solches System in rauem Gelände zurechtkommen, wie z.Bsp. mit Geröll, Kies oder Treppen.
Das gilt im speziellen für Roboter, welche im Sicherheitsbereich und im Rettungs- bzw. Ortungsbereich eingesetzt werden.
Kettengetriebene Roboter werden oftmals als bester Kompromiss zwischen Geschwindigkeit und Geländegängigkeit angesehen. Solche Roboter haben jedoch einen hohen Energiebedarf und sind, bis auf wenige Ausnahmen, nicht in der Lage, sich auf Treppen oder auf steilen Hängen zu bewegen.
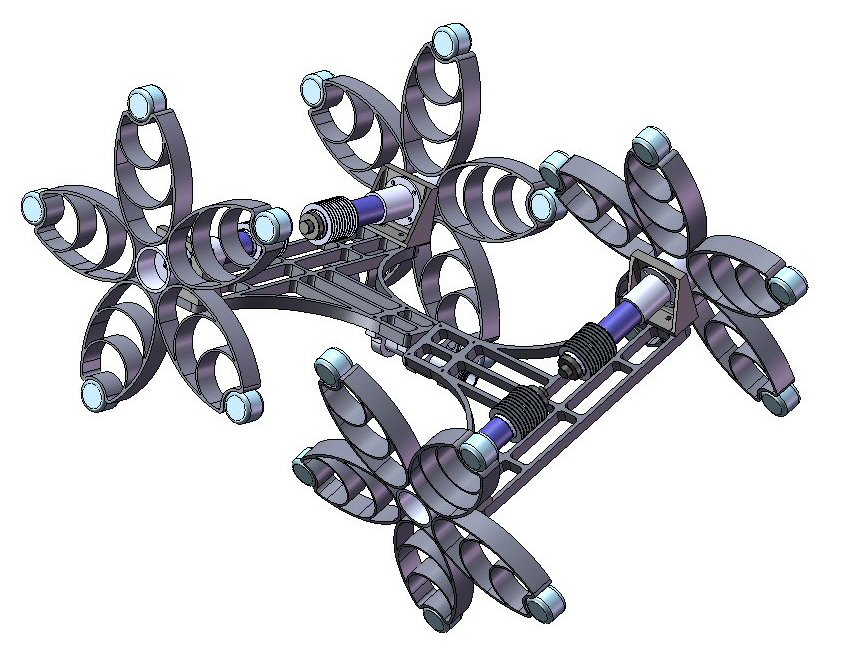
Inspiriert durch Vierbeiner, wurde der hybride Bein-Rad Roboter ASGUARD entwickelt.
Der Roboter wurde speziell für raue Umgebung entwickelt, während der Fokus auf Anwendungen im Außenbereich liegt sowie bei Sicherheitsanwendungen und bei Katastropheneinsätzen. Für solche Anwendungen muss ein Roboter eine Auswahl an missionsspezifischer Nutzlast zum Einsatzort transportieren, oftmals in schwer zugänglichem Gelände. Durch die Verwendung von adaptiven bio-inspirierten Kontrollansätzen ist ASGUARD in der Lage, Treppen zu überwinden. Mit dem gleichen Kontrollansatz erreicht der Roboter hohe Geschwindigkeiten auf ebenem Gelände.



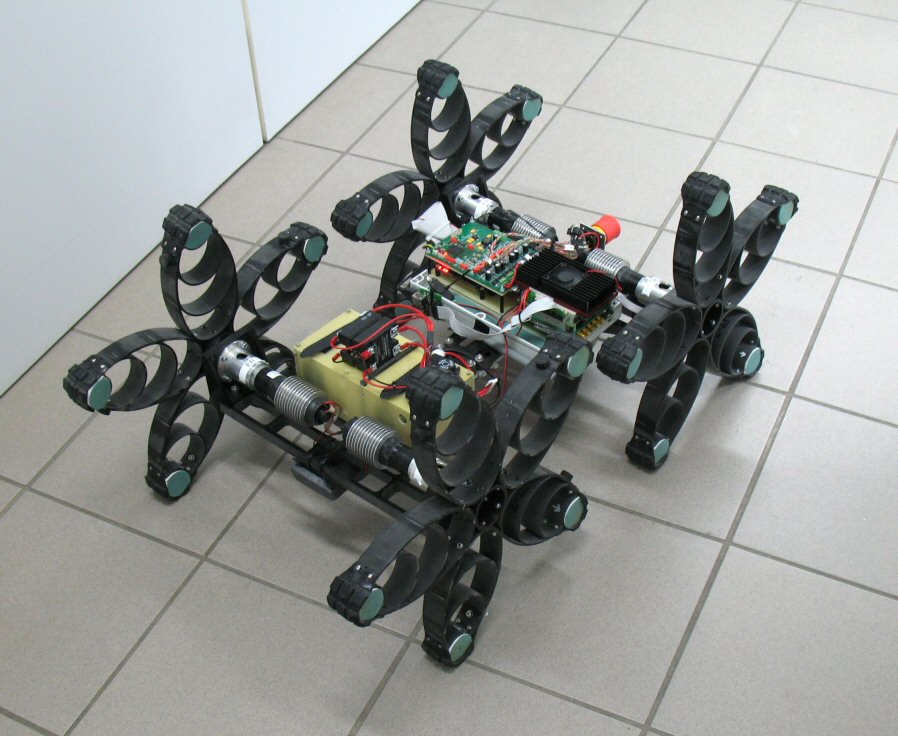
Fotos: DFKI GmbH