MODKOM
Modulare Komponenten als Building Blocks für anwendungsspezifisch konfigurierbare Weltraumroboter
Für Serviceoperationen an Satelliten oder die Erkundung fremder Planeten stellen robotische Systeme in Zukunft ein besonderes Interesse dar, da sie gegenüber der bemannten Raumfahrt verhältnismäßig kostengünstig und zugleich flexibel genug sind, um auf unvorhergesehene Ereignisse reagieren zu können. Bislang werden die entwickelten und verwendeten Lösungen jedoch stark missionsspezifisch aufgebaut und sind somit hoch spezialisiert. Demgegenüber soll durch die Definition Standards und Modulen auf zukünftige Explorations- und Servicemission schnell reagiert werden können. Im hier beschriebenen Vorhaben liegt der Fokus auf der technologischen, mechatronischen und softwaretechnischen Entwicklung modularer Funktionseinheiten für rekonfigurierbare und mobile Robotersysteme. Die Leistungsfähigkeit der in diesem Projekt entwickelten Module soll dabei anhand der Realisierung eines mobilen Manipulationsssystems demonstriert werden. Dafür werden vorhandene, für Explorationsmissionen unabdingbare Funktionseinheiten innerhalb des Vorhabens verwendet und derart weiter entwickelt, dass eine Erhöhung des TRL stattfindet. Ist ein Fundus von Funktionseinheiten vorhanden, können robotische Systeme entsprechend der Aufgabe basierend auf dem Baukastensystem rekonfiguriert werden.


Projektdetails
In der Raumfahrt spielen robotische Systeme mehr und mehr eine überaus wichtige Rolle. Im Fokus des Vorhabens steht der Kompetenz- und Technologie-Transfer zwischen terrestrischen und Raumfahrt-Anwendungen als auch das Verringern von eigenen Entwicklungen für spezifische Anwendungen. Dazu soll eine Vernetzung von Hi-Tech-Entwicklungen aller möglichen Technologie-Bereiche (u.a. der Künstlichen Intelligenz (KI) berücksichtigt werden.
Im hier vorgestellten Projekt MODKOM soll sich auf die technologische, mechatronische und softwaretechnischen Entwicklung modularer Funktionseinheiten für rekonfigurierbare Robotersysteme, welche bei unterschiedlichen Raumfahrtmissionen zum Einsatz kommen können, fokussiert werden. Mit der Anwendung von Methoden der Künstlichen Intelligenz sollen die Module in der Lage sein, autonom zu agieren und auf unvorhergesehene Ereignisse zu reagieren.
Die Leistungsfähigkeit der in diesem Projekt (weiter-)entwickelten Methodik und Module soll dabei anhand der Realisierung eines komplexen mobilen Manipulationsssystems demonstriert werden.
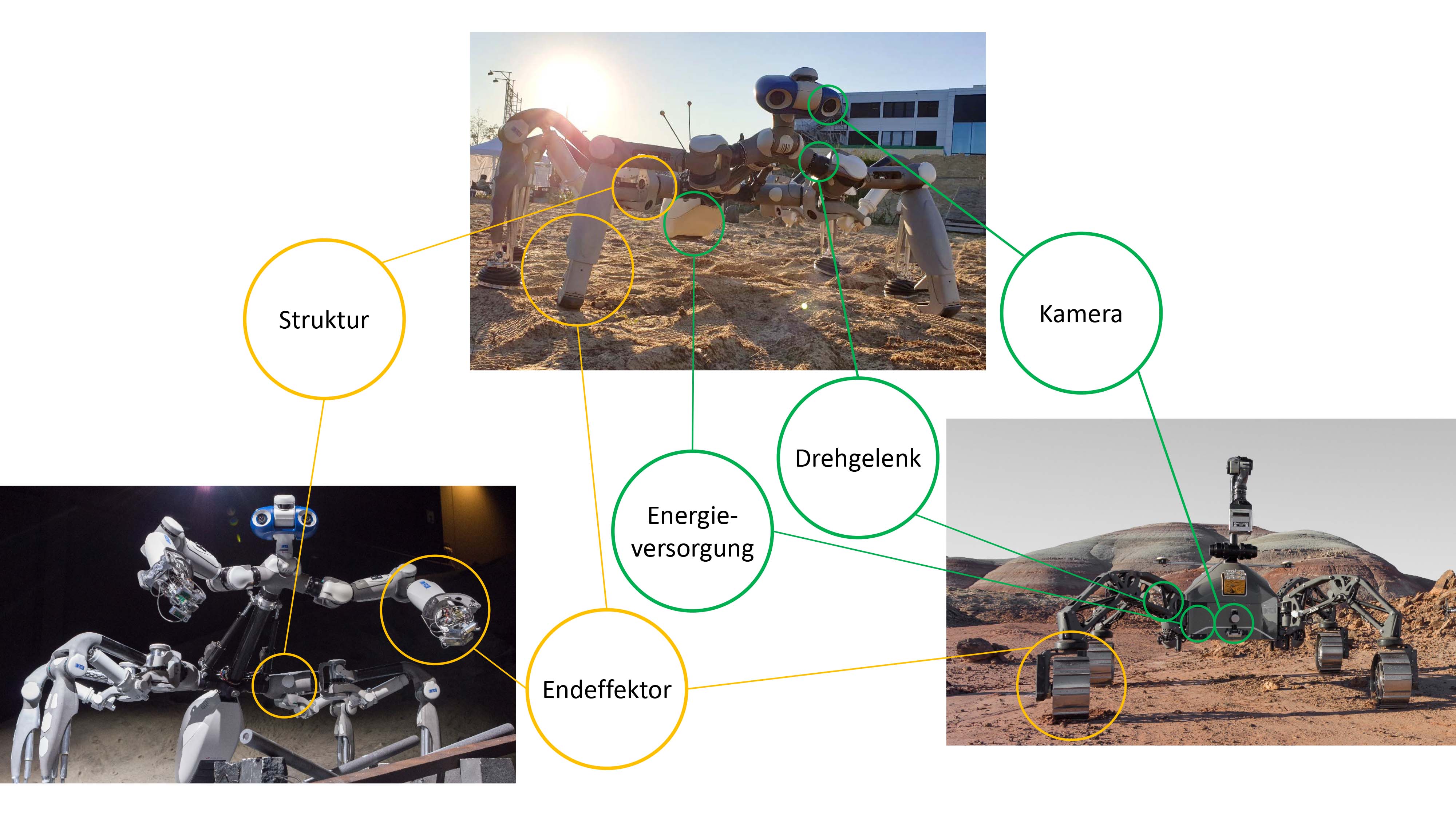
Dabei soll nicht nur die Funktionsfähigkeit der ausgewählten Module aufgezeigt werden, sondern auch deren reibungsloses Zusammenspiel in einer beispielhaft zusammengesetzten mobilen Gelenkkette.
Diese Art von Modulen sind zum Beispiel für die Durchführung von Serviceoperationen an Satelliten im Orbit oder die Erkundung der Oberflächen fremder Planeten robotische Systeme von besonderem Nutzen und Interesse, da sie gegenüber der bemannten Raumfahrt weniger riskant und verhältnismäßig kostengünstig sind. Bislang werden die entwickelten und verwendeten Lösungen stark missionsspezifisch aufgebaut und sind somit hoch spezialisiert. Mit Hilfe der Ergebnisse aus MODKOM als auch der Definition von Normen, Standards und Modulen können zukünftig Lösungen flexibel konfiguriert und mit geringem Aufwand an neue oder sich ändernde Anforderungen an das Gesamtsystem angepasst werden, ohne jedes Mal eine komplette Neuentwicklung durchführen zu müssen.
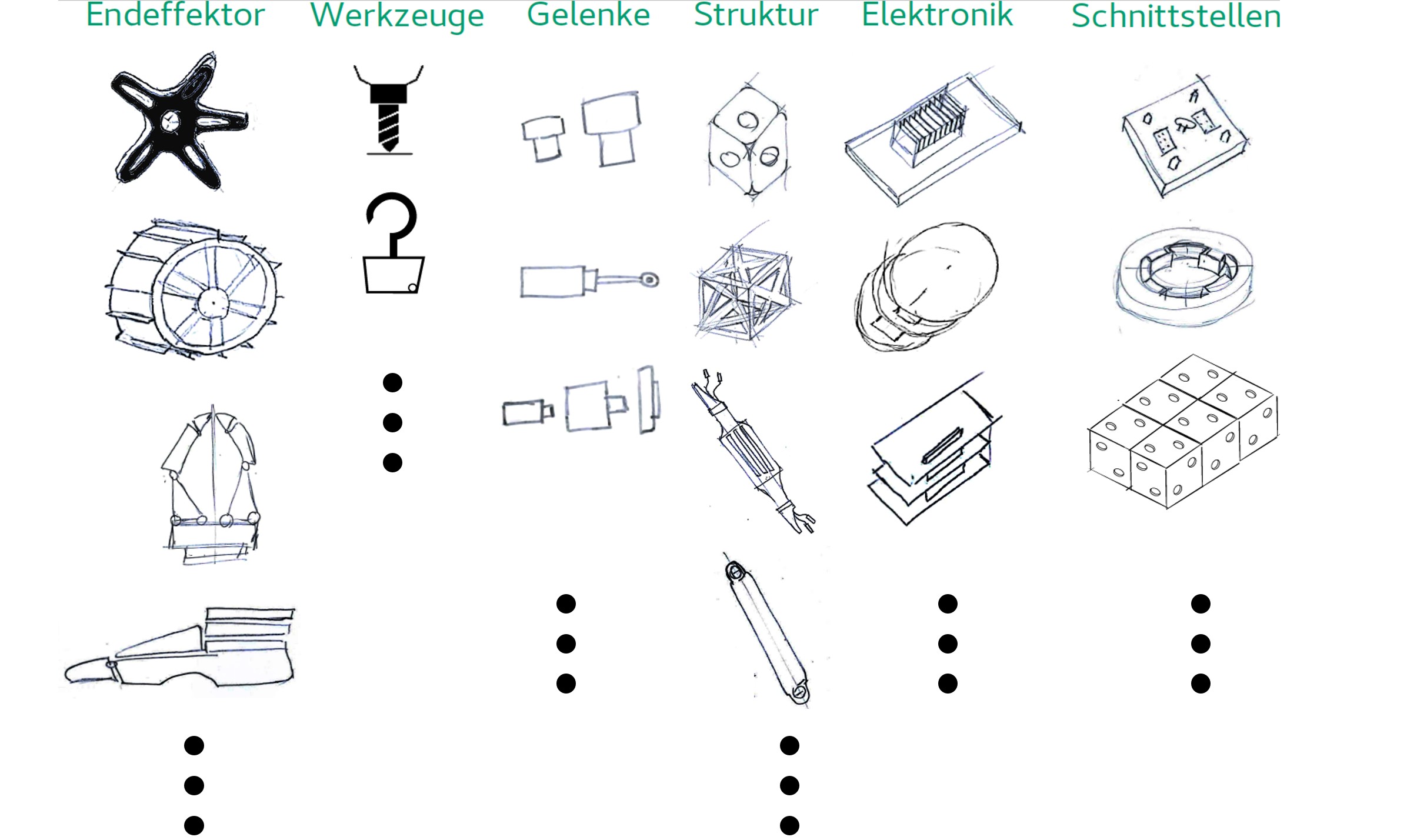
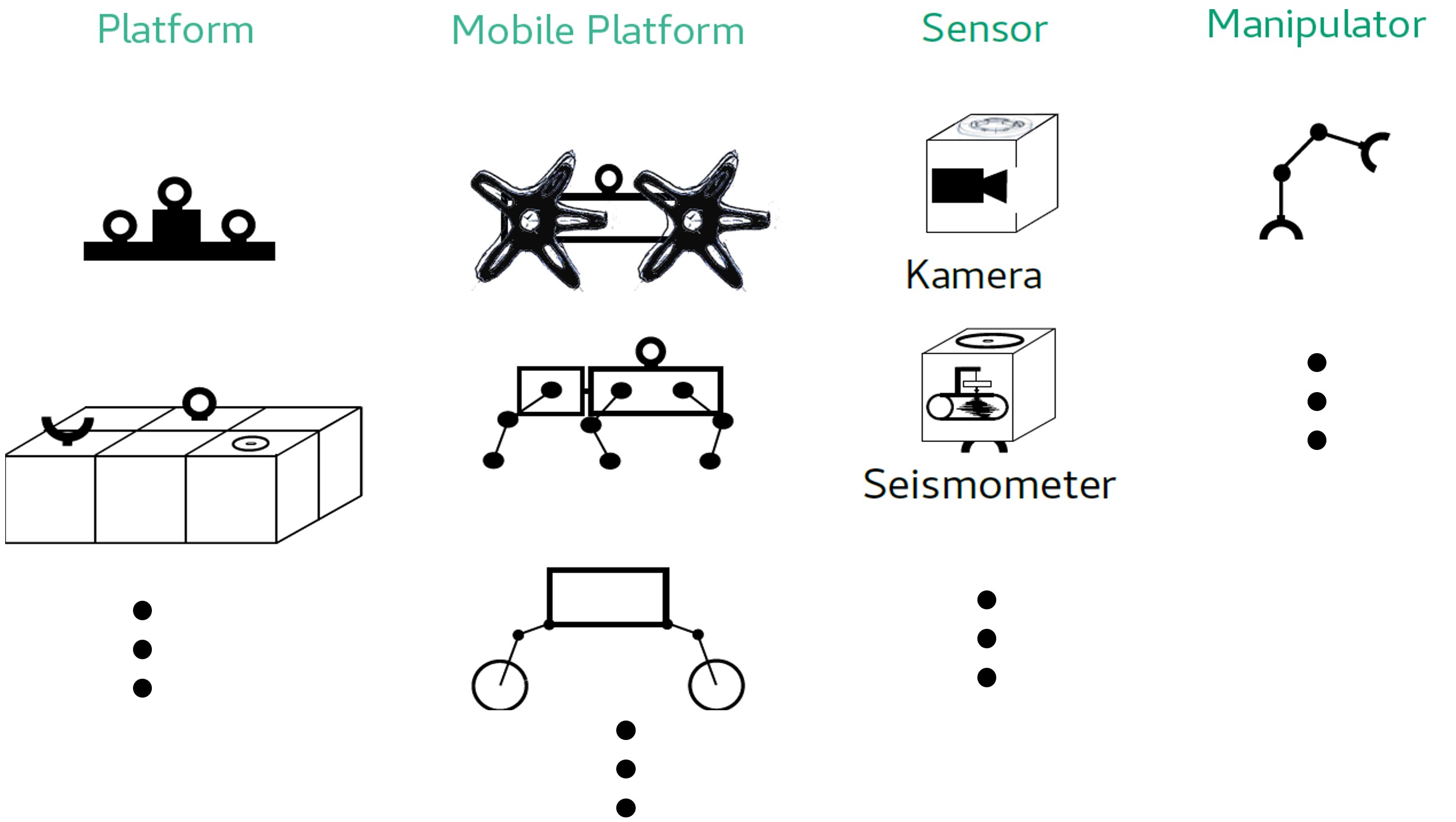
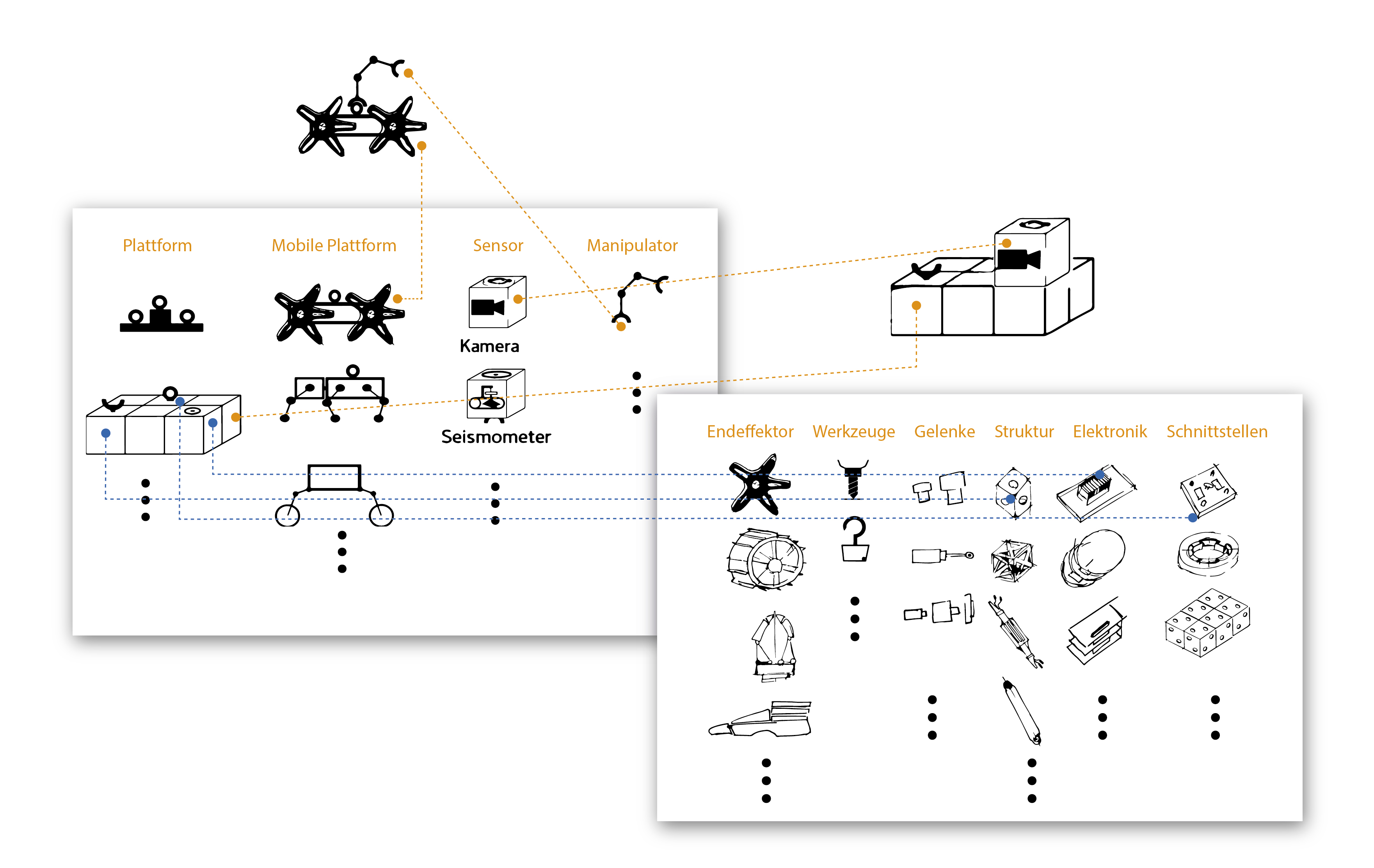
In MODKOM werden vorhandene, für robotische Raumfahrt-Missionen unabdingbare Funktionseinheiten identifiziert und derart weiterentwickelt, dass sowohl soft- als auch hardwaretechnisch eine Art Plug-and-Play-Lösung über eine Schnittstelle bereitgestellt werden kann. Sofern bestehende Module eine benötigte Funktionalität nicht bieten, werden bestehende Entitäten entsprechend modifiziert. Sobald ein Fundus von Funktionseinheiten verfügbar ist, können robotische Systeme entsprechend der Aufgabe basierend auf dem Baukastensystem rekonfiguriert werden. Diese Entitäten sind formal beschreibbar, um beispielsweise einen Einsatz von Lern- und Optimierungsverfahren zum Generieren und Bewerten von geeigneten Konfigurationen, im Hinblick auf spezifische Anforderungen, zu ermöglichen.
Basierend auf bereits gewonnenen Erkenntnissen und Kompetenzen in bisher durchgeführten Projekten als auch verfügbaren Ergebnissen externer Entwicklungen will das Projektteam die Arbeiten in MODKOM durchführen und so die ambitionierten Projektziele erreichen.