iMoby
Intelligent Mobility

Dr.-Ing. Sylvain Joyeux
Navigationsalgorithmen für unbekanntes Gelände: Verbesserung der Navigationsrobustheit durch Einsatz der Körperwahrnehmungsfähigkeiten des Roboters
| Laufzeit: | 01.04.2009 bis 30.06.2012 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH |
| Fördergeber: |
Bundesministerium für Wirtschaft und Technologie
Deutsches Zentrum für Luft- und Raumfahrt e.V. |
| Förderkennzeichen: | Gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. mit Mitteln des Bundesministeriums für Wirtschaft und Technologie (BMWi) aufgrund eines Beschlusses des Deutschen Bundestages. Förderkennzeichen: 50 RA 0907 |
| Anwendungsfelder: |
Weltraumrobotik
SAR- & Sicherheitsrobotik |
| Verwandte Robotersysteme: |
ASGUARD III
Advanced Security Guard V3
ASGUARD IV
Advanced Security Guard V4
ASGUARD III
Advanced Security Guard V3
ASGUARD IV
Advanced Security Guard V4
|
| Verwandte Software: |
MARS
Machina Arte Robotum Simulans
MARS
Machina Arte Robotum Simulans
|


Projektdetails


Im Projekt „Intelligente Mobilität“ befasst sich das DFKI RIC Bremen mit den vier Kernbereichen der autonomen Navigation, wie Steuerung, Kartierung, Lokalisierung und Entscheidungsfindung beim Einsatz von robotischen Systemen.
Neben der üblichen Ausrüstung mit Kameras, Laserscanner und Radar wird zusätzliche Sensorik zur Realisierung von Körperwahrnehmungsfähigkeiten (z.B. Berührung, Vibration und Bewegungskontrolle) in das am DFKI RIC Bremen entwickelte robotische System ASGUARD integriert. Somit ist es möglich, Parameter in Bezug auf die Umgebung in die Navigationsalgorithmik einfließen zu lassen.
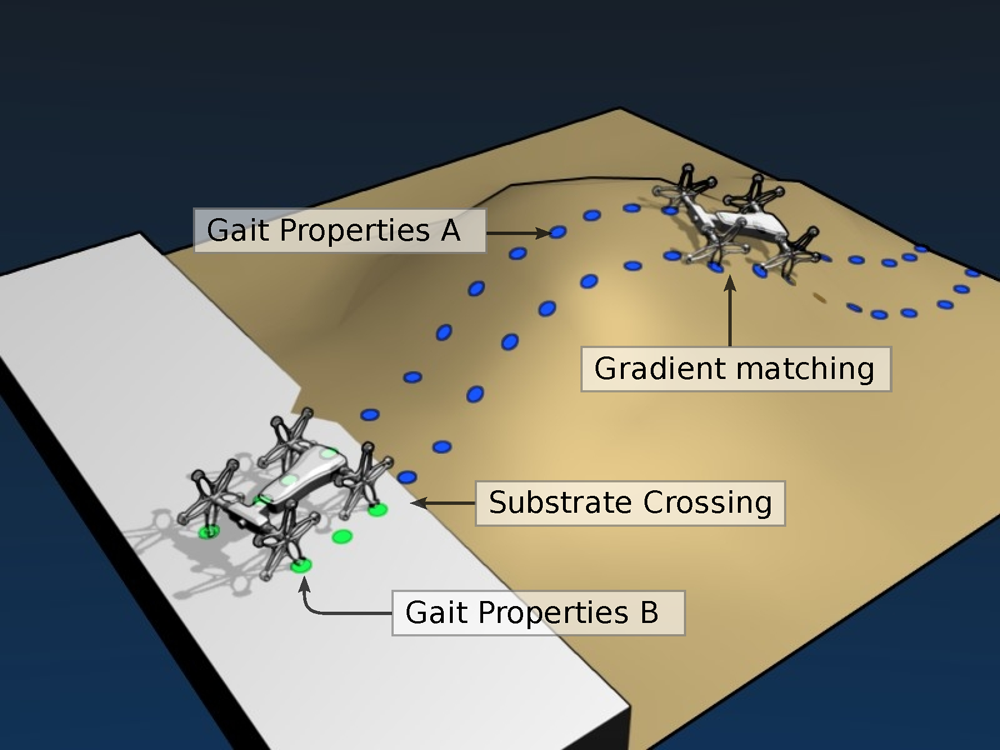
ASGUARD hat sich bereits in zahlreichen Testumgebungen ausgezeichnet bewährt und muss lediglich um die Aufnahme von ergänzender Sensorik erweitert werden. Ziel der Aktivitäten im Vorhaben ist es, autonome Robotiksysteme mit möglichst größter „Intelligenz“ auszustatten, um eine optimale Steuerung in unterschiedlichen Umgebungen zu erreichen. Hierbei spielt die Erfassung von Untergrund- und Geländebeschaffenheit durch integrierte Körperwahrnehmungsfähigkeiten eine wesentliche Rolle. Ein solches System muss sich während der Fortbewegung, egal ob auf losem oder befestigtem Untergrund, flachem oder geneigtem Gelände, so anpassen können, dass es die ihm vorgegebene Mission in jedem Fall erfüllen kann (Abb. 1).
Ein weiteres Ziel des Vorhabens ist die Einbindung von Körperwahrnehmungsmöglichkeiten in die Lokalisierung und Kartierung. Der Roboter muss auf der einen Seite zur Erstellung einer Karte in der Lage sein, seine aktuelle Position genau bestimmen zu können. Gleichzeitig muss er auf der anderen Seite seine Position auf vorhandenen Karten einschätzen können. Zur Verbesserung von verfügbaren SLAM (Simultaneous Localization And Mapping) Algorithmen werden die durch die Körperwahrnehmungsmöglichkeiten zusätzlich gewonnenen Informationen eingebunden (Abb. 2). Somit entstehen am DFKI RIC Bremen erste embodied SLAM (eSLAM)- Algorithmen.
In einem letzten Projektabschnitt wird das robotische System mit der Fähigkeit, Hindernisse zu erkennen und daraufhin eine Entscheidung für das weitere Vorgehen zu treffen, ausgestattet. Damit wird ASGUARD in der Lage sein, kritische Situationen durch den optimalen Einsatz seiner Fähigkeiten (z.B. Schwimmfähigkeit) zu vermeiden.
Videos
ASGUARD v4
ASGUARD bei ersten Tests im Gelände
iMoby: Einfache Geschwindigkeitskontrolle vs. Rad-Synchronisation
Einfache Geschwindigkeitskontrolle vs. Rad-Synchronisation
ASGUARD v2: Intelligente Mobilität (Final Promotion)
Finales Promotion Video von Asguard v2 im iMoby Projekt.

.")