Entern
Umgebungsmodellierung und Navigation für robotische Weltraum-Exploration

Das Projekt Entern befasst sich mit Technologien für den autonomen Betrieb von Robotern in lunaren und planetaren Explorationsmissionen. Es werden dabei die Themen Operation & Kontrolle, Umweltmodellierung und Navigation behandelt. Ziel ist es die autonomen Fähigkeiten von einzeln agierenden Robotersystemen in besonders schwierigen Bereichen wie Kratern und Höhlen zu verbessern. In der Umsetzung wird dafür unter anderem auf On-board-Simulation gesetzt. Dies ermöglicht dem Roboter kritische Situationen besser selbständig bewerten zu können.
| Laufzeit: | 01.10.2014 bis 31.12.2017 |
| Zuwendungsempfänger: | Deutsches Forschungszentrum für Künstliche Intelligenz GmbH & Universität Bremen |
| Fördergeber: |
Bundesministerium für Wirtschaft und Klimaschutz
Deutsches Zentrum für Luft- und Raumfahrt e.V. |
| Förderkennzeichen: | Gefördert von der Raumfahrt-Agentur des Deutschen Zentrums für Luft- und Raumfahrt e.V. (DLR) mit Mitteln des Bundesministeriums für Wirtschaft und Klimaschutz (BMWi) aufgrund eines Beschlusses des Deutschen Bundestages unter dem Förderkennzeichen 50RA1406 (DFKI) und 50RA1407 (Universität Bremen). |
| Partner: |
Universität Bremen |
| Anwendungsfelder: | Weltraumrobotik |
| Verwandte Projekte: |
iMoby
Intelligent Mobility
(04.2009-
06.2012)
LIMES
Lernen intelligenter Bewegungen kinematisch komplexer Laufroboter für die Exploration im Weltraum
(05.2012-
04.2016)
VirGo4
Vorhersagesysteme in reaktiven Gruppen autonomer Roboter
(04.2011-
06.2014)
|
| Verwandte Robotersysteme: |
CREX
Crater Explorer
ASGUARD IV
Advanced Security Guard V4
CREX
Crater Explorer
|
| Verwandte Software: |
MARS
Machina Arte Robotum Simulans
Rock
Robot Construction Kit
|


Projektdetails
Das Projekt Entern befasst sich mit robotischen Systemen für lunare und planetare Explorationsmissionen. Insbesondere werden dabei Technologien zur robusten autonomen Erkundung von Kratern und Höhlen im Kontext von Raumfahrtmissionen entwickelt. Derartige Umgebungen sind von besonderem wissenschaftlichen Interesse und stellen durch ihre geschützte Lage potentielle Standorte für zukünftige Infrastrukturen und Habitate dar.
Die Navigation in den genannten Umgebungen stellt besondere
Anforderungen an die Methoden der Navigation und die mobilen Fähigkeiten
robotischer Systeme. Inhalt des Projekts Entern ist die Entwicklung von Software- und Hardwarelösungen um existierende hochagile Explorationssysteme in diesen Umgebungen teil- und vollautonom betreiben zu können. Dabei werden die Themen Umweltmodellierung, Navigation sowie Operation und Kontrolle behandelt.
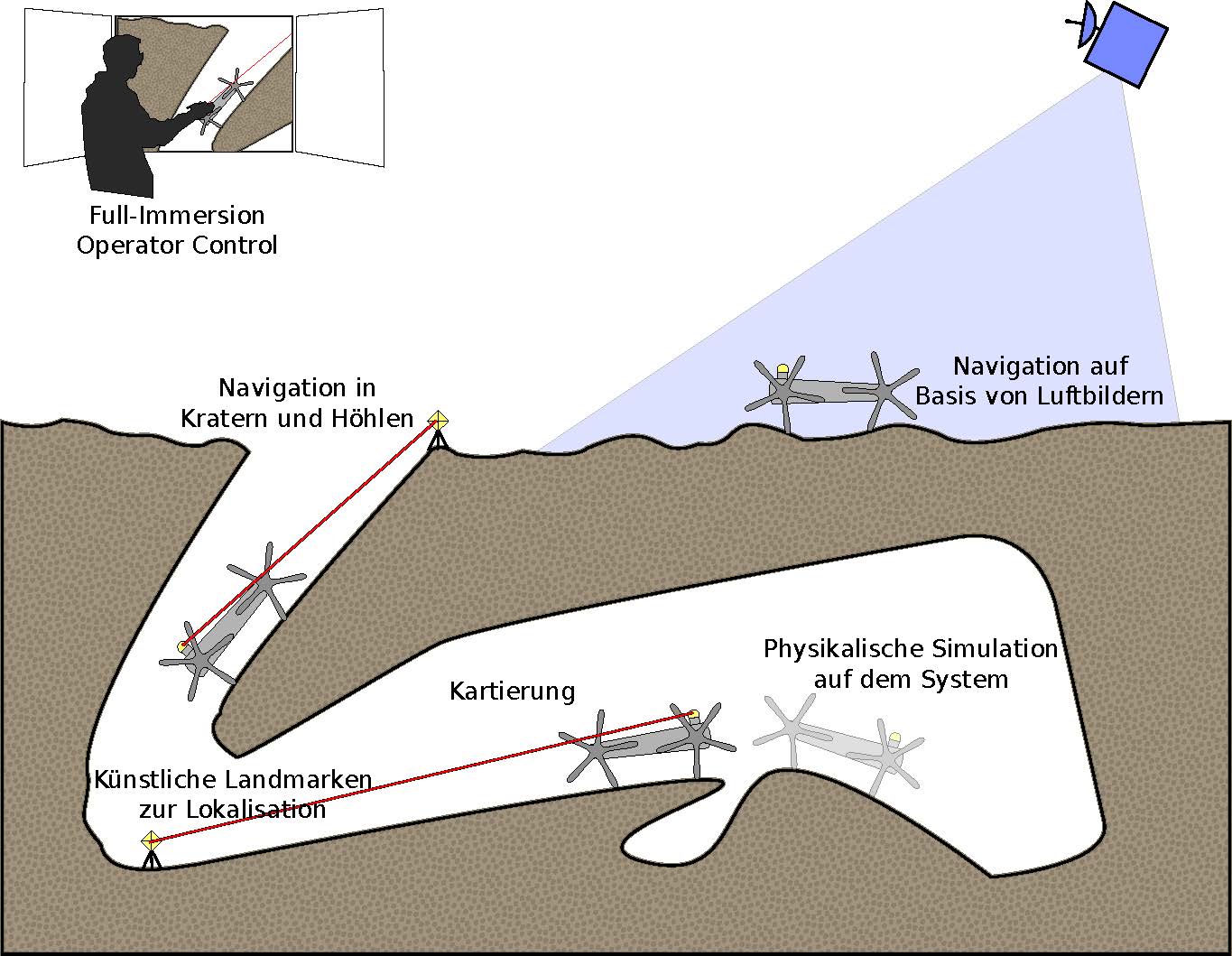
Das Anwendungsszenario befasst sich mit der Navigation zu interessanten
geographischen Stellen wie Höhlen oder Kratern mit Hilfe von Luftbildern
oder Aufnahmen eines Orbiters. Um das komplexe und steile Gelände an diesen Orten zu überwinden, werden genaue physikalische Simulationen des Systems in Umweltrepräsentationen eingesetzt, die auf dem System erzeugt wurden. Durch eine einheitliche Repräsentation des Umweltmodells für Simulation und Robotersystem kann eine Lösung der Situation sowohl in einer interaktiven Weise mit Hilfe eines Operators als auch durch autonome Durchführung der Simulation auf dem Robotersystem selbst erzeugt werden.
Die Entwicklung einer Umgebungsrepräsentation und benötigter Softwaretools sowie die Einbindung der Simulation zur On-board-Ausführung sind wesentlicher Kernbestandteil der Arbeiten. Weiterhin werden die Einbindung einer Kontrollstation und die relevanten Aspekte wie Überwachung der Kommunikation und asynchrones Missionsmanagement in Bezug auf das Zielszenario betrachtet. Der Navigationsaspekt spielt dabei eine weitere wichtige Rolle. So wird in dem Projekt speziell auf die Schwierigkeiten bei der Navigation von Kratern und Höhlen eingegangen. Die Kartierung wird durch die Nutzung von künstlichen Landmarken gestützt und die erzeugten Daten können in existierenden Geoinformationssystemen referenziert werden.
Die im Projekt entwickelten Verfahren werden an den existierenden Systemen Asguard sowie CREX evaluiert. Die Systeme werden den Aufgaben entsprechend in Hard- und Software angepasst.
Videos
Feldtests während des Projekts ENTERN
Die neueste Version von ASGUARD mit autonomen Navigationsfunktionen.